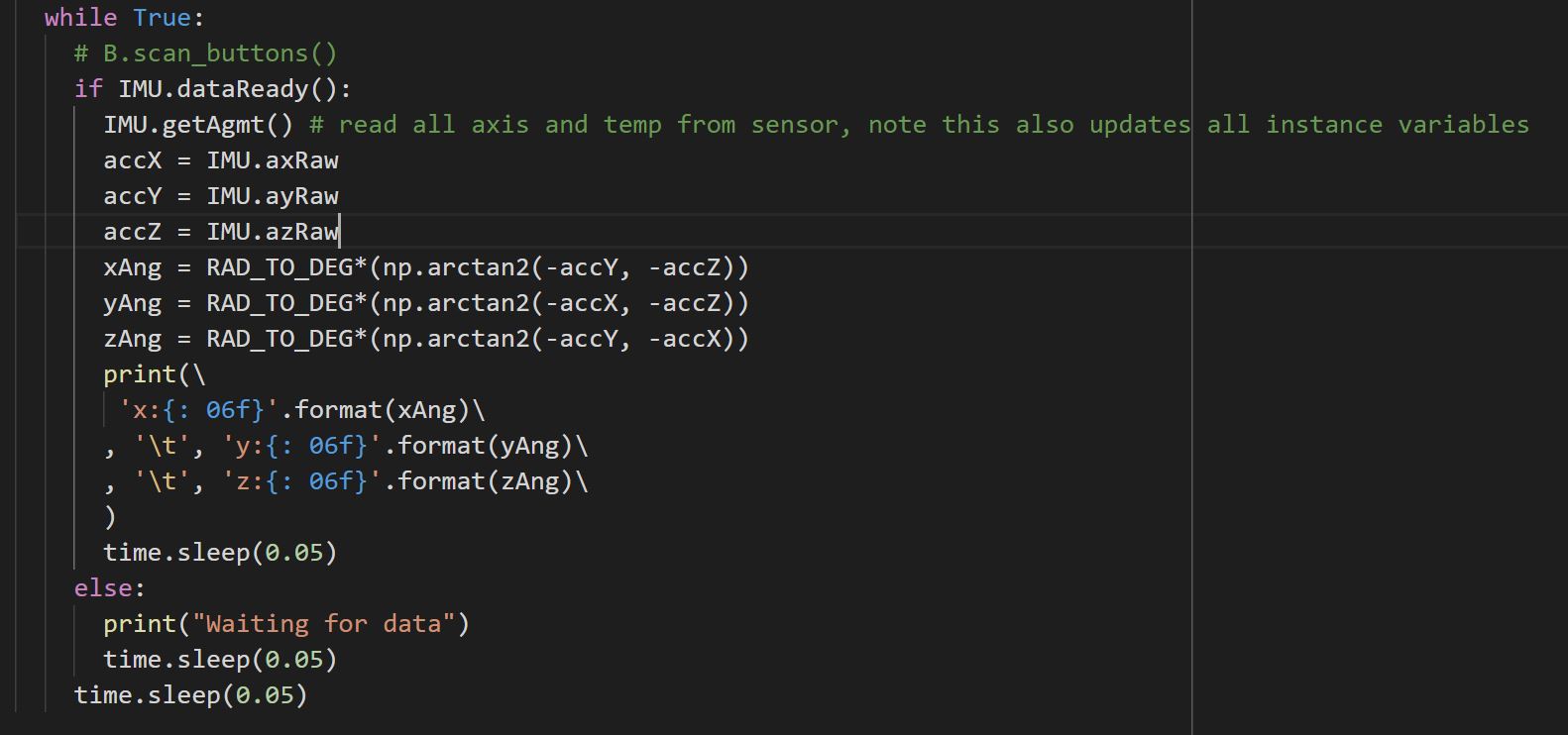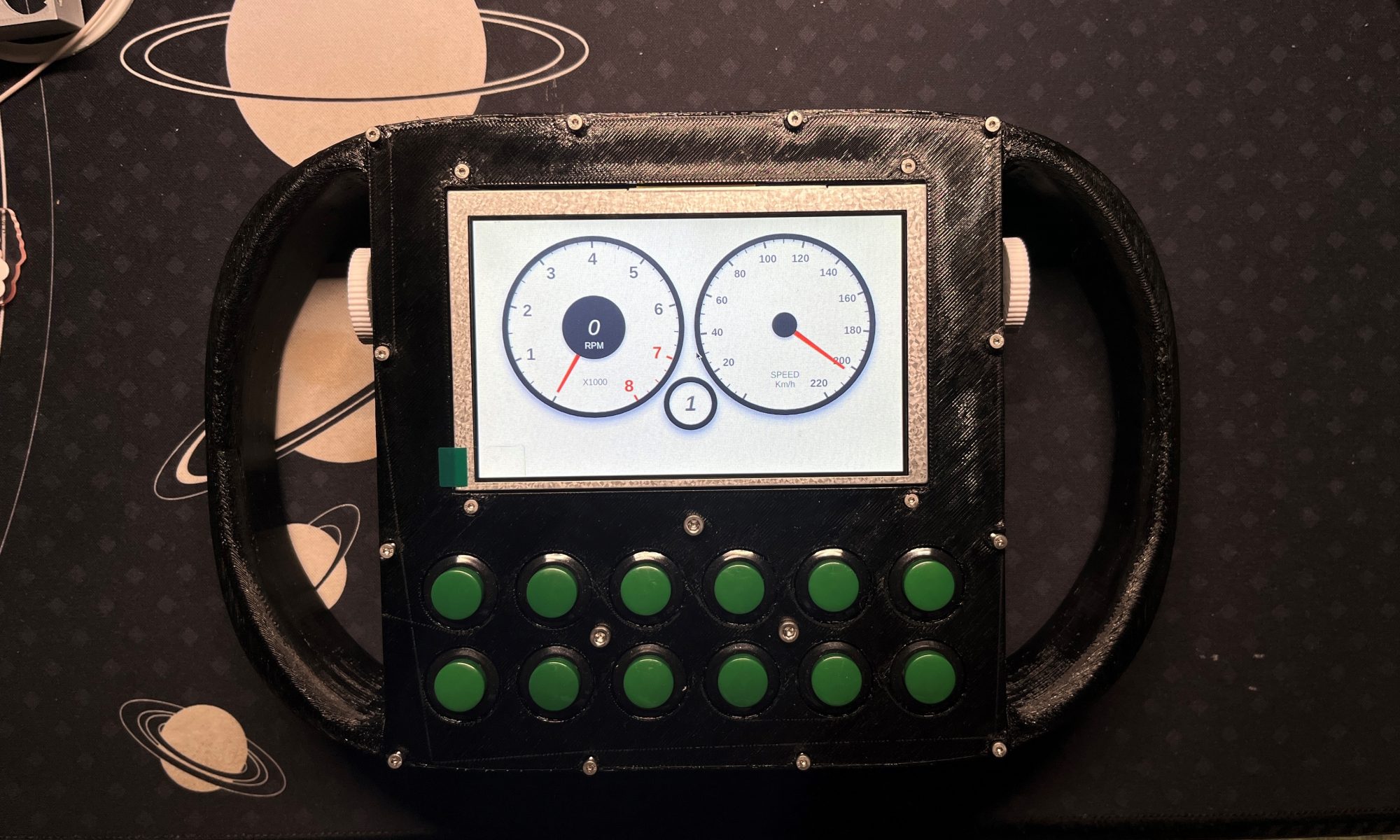
I’ve been working through Spring Carnival to get the first prototype working. It is indeed integration hell. The job of designing the 3D models for the enclosure was shifted from being Qiaoan’s to mine, since he was busy working on the Magwick algorithms for the gyroscope. I designed and 3D printed the enclosure, did custom wiring and now the whole thing works. I also integrated Qiaoan’s gyro implementation and Yuxuan’s gauge UI inplementation.
One small problem is that now the power delivery module is not bolted on to the RPi anymore, and the single power and ground wire I used was not enough for the power requirements of the RPi 4. I will try connecting multiple wires to all of the RPi’s power terminals to solve the problem. So far, the problem is not affecting the performance of our controller (other than the ugly low voltage prompt that is on top of everything LOL).
We are on schedule for next week’s presentation.