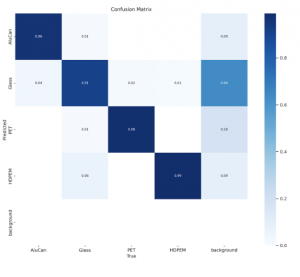
This week, we started with setting up YOLO running on GPU with both Google Colab and HH machines. Along the side, we have also started setting up Jetson. After the YOLO code could be run on Google Colab, we trained with 20 epochs and the results are shown with images in the end. In short, the code exceeded an accuracy of 90% for all 4 types without fine tuning. Using the weights learned by the training, we have done test runs of inference using Jetson which could also successfully run to finish. The reason we decided to pursue both tracks is that gcp is quite expensive where 10 epochs cost $40. Fortunately, we are able to reach a decent accuracy for now with 20 epochs.
For the images shown at the end of this report, the first one shows a sample result where an item is detected and classified. The text shows its classification result and the number is the confidence level of the classification. Our code could also run on the HH machines now, but because it is already working on Jetson, we decided to pause that route for now.
Our biggest risk still lies in our limited experience with mechanical design. However, we have communicated the concern with the staff in meetings and we have professors and TAs who could help us along the way, especially the woodwork. For now, we are working on design graphics with specific measurements and will share that with staff soon. Besides that, there are no design changes made.
Due to delayed shipping of parts, we are slightly behind on building the hardware part. Besides that, the software system and integration with Jetson is going fine. We are planning to finish implementation of detection & classification on Jetson in two weeks and make sure basic communication between Jetson and Arduino will work by the interim demo. For communication, Arduino needs to receive a boolean value in real time that Jetson sends. The Serial module (same name for Arduino and Python) would be used for that.