This week, I worked on CV. I have some preliminary code that correctly identifies whether an ArUco marker is in the frame (no frame or multiple frames). I am currently working on integrating this into our current system. The plan is to publish this data to a ROS topic so that the Jetson can use it for path planning/SLAM.
I also helped with setting up and integrating more of the system this week. The SLAM node has been installed and seems to be working correctly. The obstacle mapping seems to be accurate when we tested it but the localization is not turned well.
For this upcoming week, I plan to finish the CV ROS integration and help the rest of my team with setting up our testing environment.
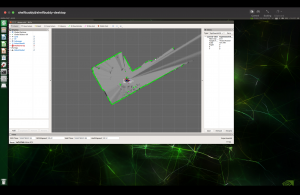
Below is an image of the SLAM visualization as well as the current location the robot is in. As you can see, the data is pretty accurate; the walls and hallway are clearly defined.

EDIT: I forgot to upload a picture of the SLAM visualization. It is below: