
I have made a good amount of progress on the robotic arm subsystem. With the 3D printed links and wooden base I created before the start of the break, the electrical parts our team borrowed from the inventory, and the electrical parts and motors I already owned, I was able to complete about 80% of both the electrical subsystem and the mechanical parts of the robotic arm during spring break. Below are pictures of that progress.
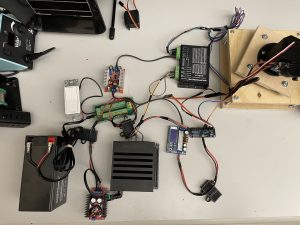
 With the arrival of most parts on Monday, I was able to complete and test the electrical subsystem on Monday and completed the mechanics and heat-proofing of the robotic arm on Tuesday. Below are pictures of the completed electrical subsystem and robotic arm.
With the arrival of most parts on Monday, I was able to complete and test the electrical subsystem on Monday and completed the mechanics and heat-proofing of the robotic arm on Tuesday. Below are pictures of the completed electrical subsystem and robotic arm.

During the rest of the week, I configured the Jetson AGX Xavier and set up the software environment. I programmed the 5 servo motors to properly turn with certain inputs, and I was also able to program the stepper motor to turn properly at the appropriate speed and direction. Below is a video of that. I will now have to work on the computer vision for the robotic arm using the camera that we bought. My plan is to now work on and complete the inverse kinematics software in two weeks at the earliest, and three weeks at the latest (which will take up one week in April). I am at a good pace to complete the robotic arm subsystem before integration.