This week, the team has been diligently working towards being ready for our project demo on Wednesday 4/6. We seem to be in a very good spot with all of our subsystems in a presentable point.
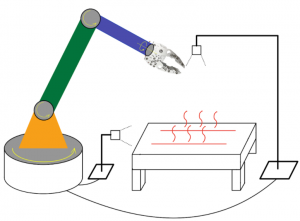
Joseph can demonstrate the robotic arm we plan to use to flip and transport the meats being cooked. The inverse kinematics of it have been difficult to implement, but at least we will be able to show that it moves with the range of motion that we need for our end goal. We have the wiring and other heat-sensitive parts insulated so that they will be protected from the high temperatures of the stove. This has been tested using a soldering iron which did not have any effect on the more delicate internals of the arm.
Raymond has blob detection working with the CV able to detect meats with decent accuracy. He has switched from image classification to object recognition to prevent scenarios where a user places 2 different types of meat on a plate. He has changed parameters of the original blob detection algorithm to be better at identifying meats instead of other objects in the scene, along with improving performance in low light conditions.
Jasper has finished work with the UI and cooking time algorithms. The UI is hopefully clear enough to provide a clean and intuitive experience for the user. It displays information about the detected thickness of a new piece of meat, how long the system decides it needs to cook, and which section of the grill it will go on. There is also an overhead camera feed of the grill which displays which section is which, enabling the user to be confident that the system of working as intended. We plan to add the capability of changing the remaining cooking time for any section that they select, but we do not have that working yet.
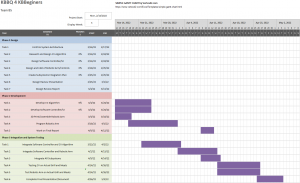
Overall, the project is keeping up with the proposed schedule from earlier in the semester, and the team has made great progress.