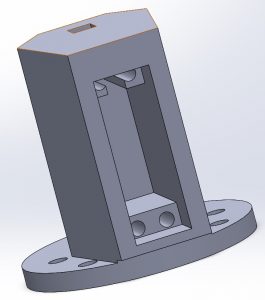
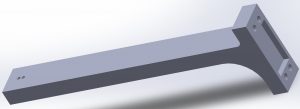
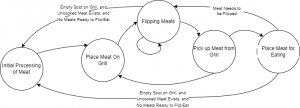
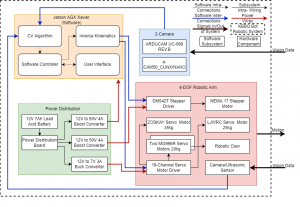
Most of this week was spent creating and finalizing our design decisions. I spent my time creating the System Architecture, System States, and Electrical System Diagrams. The CAD models of our 3 robotic links were also created by me. I also created a parts list of everything that our team currently owns, borrowed, or needs to buy. I will start submitting parts for order next week after our design is reviewed through our presentation. I have also updated the Gantt Chart to show our progression and add more slack. All these diagrams and documents are crucial for the design presentation, design report, and the next stage of development. The creation of all these diagrams helped me consolidate design choices. This was a particularly busy week for me as I had to complete most of the robotic arm design for the presentation. I expect that next week will be more relaxed as I start creating the report and finalizing any design questions. Here are the pics of what I have worked on this week. Please look at our Design presentation slides for better quality pics.