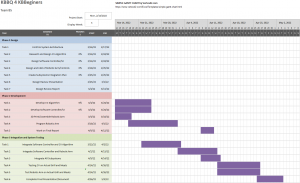
One risk we have not considered to the extent we should have until feedback from the instructors for other proposals was slack and integration time. For one, our integration between the software controller and the computer vision algorithm and the integration between the software controller and the robotic arm happen almost simultaneously, which creates the issue of integrating 3 items at the same time, greatly complicating the process of integration. Developing the Computer Vision and software interface might take less time compared to the robotic arm, so one idea proposed is to reduce the development time of computer vision and software by a few days or a week and use that extra time to integrate. Furthermore, testing the robotic arm on an actual grill should take place before the integration step, in the case of a serious misunderstanding of the heat tolerances of the arm. We also made a basic concept drawing of our robotic system. Here is our updated schedule, mostly seen at the end of March and the month of April (I’m sorry for the image quality it cannot be improved for some reason, but we have made some dates for integration longer and software and CV implementation shorter).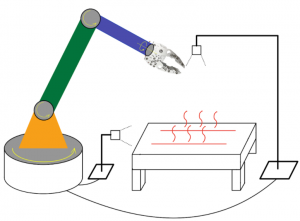


Carnegie Mellon ECE Capstone, Spring 2022 – Joseph J., Jasper L., Raymond N.