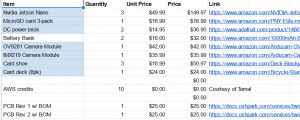
Last week, we ordered the first batch of parts to prototype our system. Shipping took a week longer than we planned for, but we got the parts on Thursday. While we waited, I researched lens distortion correction in case that is necessary for the system. Starting today (Friday), I have setup the Jetson Nano and am currently working to get the camera drivers working and bring-up a python script to stream images from the camera. Once I have that done, I will experiment with different camera poses and lighting. Ethan proposed angling the camera so it can sit recessed in the card shoe. That provides benefits for the physical design, so I will also explore homographies to warp images if the captures include a perspective projection.
Because shipping took longer than we expected, I may be delayed in my task list if the camera drivers pose an extended issue. I did not include a “camera bring-up” task in my Gantt Chart, but I will update my schedule in next week’s status report either way.