

Here is a link to the final report (too large to upload to WordPress): E7 PokerCam Final Report
Final Video
Final Poster
Ethan’s Status Report – 5/8/2021
This week was a big flashback to freshman year calculus as a lot of integration was happening!
We finally cut out and constructed our final enclosure and installed all the electronics and the camera. After a few technical issues were debugged we began work on our final video and poster. We hope to finish both of those tomorrow!
Jeremy’s Status Report for 5/8/2021
This week has been a roller coaster for our prototype. We spent the first half of the week preparing for the presentation. While preparing for the presentation, the ADC failed. We had to replace the ADC on the PCB with the evaluation board, but we could not retrieve photos in time for the presentation. In the second half of the week, I worked with Ethan to integrate the hardware in a new enclosure. As we turned everything on on Friday night, both the ADC and camera were not working. We spent all of Saturday debugging the ADC and camera and eventually fixed them by swapping modules and reconfiguring the ADC’s configuration register.
Sid and I decided we needed to take more training photos since the results varied under different background lighting. After looking at the trigger, I also decided to report accuracy in two parts: classification accuracy and trigger accuracy. Classification accuracy is the accuracy on the test set. The trigger accuracy is the percentage of captures that are perfectly aligned with the image. The effective accuracy should be the product of the two. We will manually test the system on a unopened card deck to obtain an effective accuracy metric.
Overall, I am on track to finish testing my subsystems.
Final Presentation
Design Review Report
Ethan’s Status Report for 3/6/2021
This week we finally ordered our first round of parts!
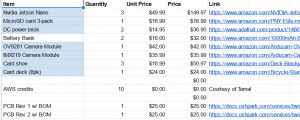
We settled on getting one Nvidia Jetson Nano for each team member so we all have access to a developer kit. We also got two camera modules to test out: the OV9281 and the Sony IMX219. Both of them are pretty promising, however the IMX219 is also available as just the module (as opposed to on an adapter board for the Jetson) so, if we want to, we can mount it to our own pcb more easily.
We hope to receive our parts and begin working on a prototype. I’ll also begin working on the PCB design once we know which of the camera modules we plan on using.