This week I worked on integrating the webserver with the motor control and openCV. I ran into some trouble with websocket communication and am having trouble with getting the virtual chess board to render when the webserver is run from the Pi. I will be working to fix this issue tomorrow so it will be ready for us to shoot our demo video on Monday. I will also be working with my teammates on the final design report this week.
Lillie’s Status Update for 05/01/2021
This week I have been working on finalizing the web application that will sending and receiving moves to and fro the Raspberry Pi on the gantry. I initially ran into some trouble with getting the board state to sync across multiple open webpages, but this ultimately turned out to be an issue with the instances of the chessboard. On loading the webpage a new chessboard was initialized instead of being stored in a database which didn’t allow other pages to access its data. Now we are storing the chessboard data in the database and updating the board via the instance stored in the database allowing multiple webpages to maintain identical board states.
This week I plan to finish the web application and test it with the Raspberry Pi on the gantry.
Team Status Report for 04/24/2021
This week we worked on further integrating the web app, gantry, and computer vision pieces. We have refined and calibrated the x-y motion of the gantry system and are working on integrating the z-motion which is functional on its own. The computer vision is still a bit finicky, so we plan to work on that a lot this week to improve accuracy. We also plan to work on fully integrating our 3 sub systems.
Lillie’s Status Report for 04/24/2021
This week I worked on refining the gripper mechanism and redesigned the plate for the y-front axis so the pulley that raises/lowers the gripper stays on more securely. I also worked a bit on the website and have been researching web sockets after trying to update across multiple pages with AJAX wasn’t working.
This week I plan to finalize the webapp interface/functionality and do more movement testing with Juan.
Lillie’s Status Report for 04/10/2021
This week I worked on remodeling the y front attachment (pictured below), assembling the gripper, and designing the z movement mechanism. I was able to do some testing with the gripper attached to the gantry and the elevator mechanism for the z motion works.
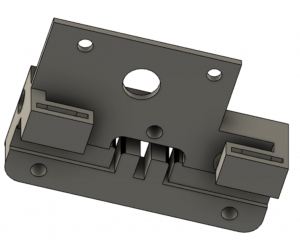
I also designed and laser cut the camera and raspberry pi mount.
This week I am going to figure out how to make the gripper arms more suitable for picking up pieces without slipping. I am also going to work on refining the website and look into Django channels to figure out how to send and receive information to and from the raspberry pi.
Lillie’s Status Report for 04/03/2021
This week I spent a lot of time in Tech Spark prototyping the camera mount and gripper mount for the gantry as well as refining the gripper model itself. Juan and I ran into a small issue with the stepper motor we planned to use to raise and lower the gripper; the maximum rpm of the motor is far too slow and will prevent us from meeting the time constraints we have outlined to quantify successful execution of our project.
This week I will look into an alternative motor for the z motion of the gripper. I will also be working on implementing the website layout Luis has drawn up. Juan and I will also setup the timing belt in the gantry system and test the x-y motion. I will finish laser cutting the camera mount and assembling it this week too.
Lillie’s Status Report for 03/27/2021
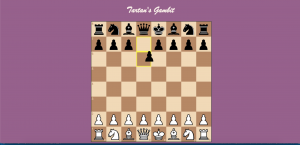
This week I worked on assembling the gantry and made some progress on the web client interface. The user can now interact with the web client interface by moving pieces with the mouse.
I have mostly put together the main components of the gantry system. The picture below shows the stepper motors and timing belt attached to the gantry. The opening closest to the excess timing belt is where the gripper will be attached and the timing belt will be held taught here. The timing belt is fed through the blue clamshell housing, and this housing is what facilitates the x-y movement of the gripper.
This week I will work on finishing the gripper prototyping and testing it out with chess pieces. I will also work on sending GET and POST requests between the web application and Raspberry Pi. I ran into some issues with the initial 4 bar linkage gripper design, so Juan and I worked together to design a new mechanism that will use guide rails and a stepper motor to facilitate z-movement of the gripper. The gripper will be attached to an acrylic plate that will be moved up and down using a stepper motor and some nylon cord and will be guided by the guide rails. A microserver will control the opening/closing of the gripper.
Lillie’s Status Report for 03/13/2021
This week I presented our design review presentation and have been working on refining the gripper mechanism after considering feedback from my presentation. This week I plan to prototype most of the parts we need and start assembling the gantry system. I am hoping to design the gripper using a four bar linkage mechanism such that we don’t have to use an extra servo for z motion but rather the gripper itself lowers as it is closing and raises above all the pieces when it is open.
Team Status Report for 03/13/2021
We think our biggest challenge is going to be figuring out how to implement the gripper mechanism. We have been having trouble getting access to TechSpark to 3D print our parts.
We have been working on the formal design report and brainstorming different ways to implement the gripper mechanism. We will begin assembling the gantry system this week and prototyping parts.
Lillie’s Status Report for 03/06/2021
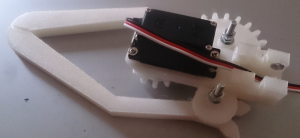
This week I worked with my group to get the parts list finalized and submit orders for parts. I also have been researching the best gripper mechanism. I’m deciding between a simple gripper like the first picture or a 4 bar linkage gripper like the second picture. A 4 bar linkage gripper might be better because we need the gripper to retract a bit vertically so it doesn’t knock over pieces as the gantry moves it. However, a simpler gripper with a rack and pinion mechanism to move it vertically may be easier to implement.
I have also starting working on the web application for interacting with the board. Chessboard.js is an open source API that will make creating the web client much faster. I am waiting to be approved for TechSpark access to send the chess pieces I designed last week to be 3D printed.
This week I plan to continue working on the web client interface and send the chess pieces to be 3D printed after I receive access to TechSpark. I also plan to finalize the gripper design and either 3D print or laser cut it.