
This week I worked on the control of the gantry and the website. As for gantry control I am able to move to every square using the Universal Gcode Sender. As I mentioned before this serves more as a testing platform as we need to continuously stream commands from our Raspberry Pi to the Arduino. To do this I have been making an Arduino script that uses the AccelStepper and MultiStepper libraries to control the motors to desired locations. Currently It is moving to fixed locations as we are testing the Z mechanism with the X-Y now.
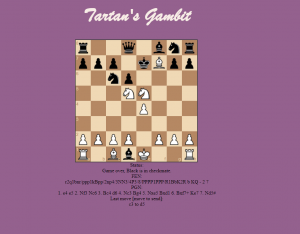
For the website I have used the chess.js library to implement a full chess game. Currently the same user has to do both moves, but only legal moves are allowed. Moves are logged in actual chess notation and the previous move is shown. The previous move is the output that we would the Pi would use to determine what the next stepper input should be. The FEN is the literal string that the chessboard.js uses to display the board position and is being used as a debugging tool.
This week I will be further developing the Arduino code so that we can fully control the gantry positioning through the serial stream. I will also be working on improving the website interface and user experience.