Significant risks:
- 3D-printed enclosure for the Raspberry Pi system will not be complete before tomorrow when we are taking pictures of our completed system
- We currently have 2 functioning haptic feedback disks, reduced from 3 in the design.
Changes Made:
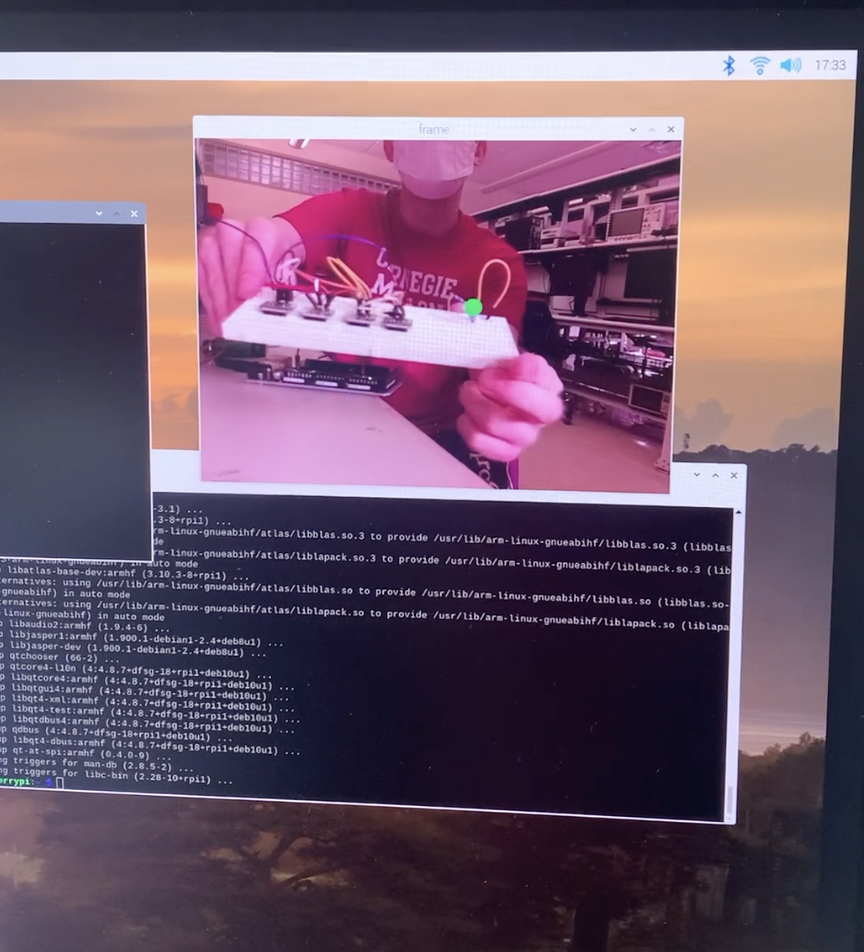
- We now have a visual indicator of our glove inside the Unity game that shows where haptic feedback is happening, which will make it easier to demo the feature virtually
- We are building a 3D-printed enclosure for the Raspberry Pi to improve the looks of our final system.
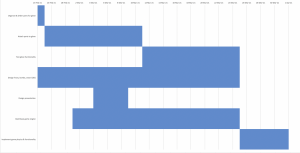
Schedule:
We are on schedule for the upcoming deadlines this week.