Our team met 3 times this week I worked on the following:
- Brainstorming how to track the glove. We narrowed it down to the following options:
- Using IR Leds + IR cameras
- Using LED + OpenCV color threshold tracking
- Using an IMU to detect acceleration and predict where the user will reach
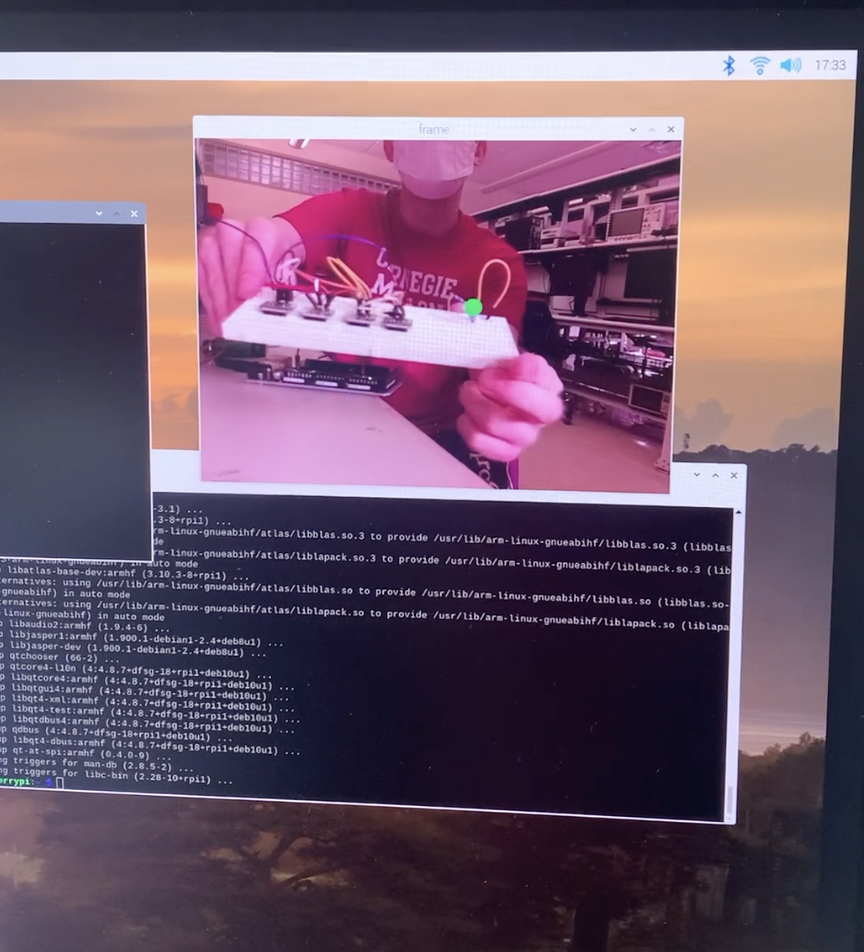
- We developed OpenCV code to track Blue LEDs. This had high accuracy and low latency. However, when background blue colors were introduced the tracker performed poorly
- To tackle the above problem, I worked with my team to write OpenCV code to track the IR LED. This converted each frame to grayscale and then applied a mask to get pixels in the range of 240-255. After applying an IR film on the camera we were able to have very good performance and there was minimal interference.
- To completely eliminate any background noise we decided to make the LEDs blink at different frequencies, and are currently trying to identify how to track blinks.
Progress Status – on schedule
Tasks for next week:
- Explore the option to track blinking IR LEDs. Attempt to develop a method using openCV contours and blinking frequency to identify blinking IR LEDs
- Explore any other options to eliminate background noise. This might involved adding a new IR LED or introducing a calibration step .
- Experiment with the IMU, attempt to use it to track acceleration and predict future points