This week I improved the Bluetooth communication protocol by constantly looking for connection between Autovots. Now, if one device is not found immediately (for example, if the device is out of range) then when the device becomes discovered, connection will be formed. Additionally, I performed some stress tests and found that once Bluetooth connection was formed, it was not easily broken (even if we moved far away or moved behind walls). For the purposes of our project, we are comfortable knowing that the Bluetooth connection will stay connected throughout the drive on the track (since the connection would only be broken when distances are more than twice the distance of our track length). Also, connection is still formed between moving Autovots within a range of 4 meters, comfortably (in open spaces).
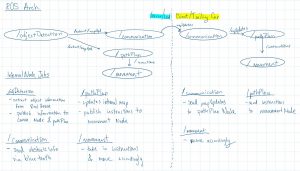
Additionally, I have begun researching ROS in depth and was performing tutorials and hope to integrate communication within ROS soon. I have also developed a rough sketch and description of what our ROS architecture will look like (note this is the first sketch so it is brief and is subject to modification).