
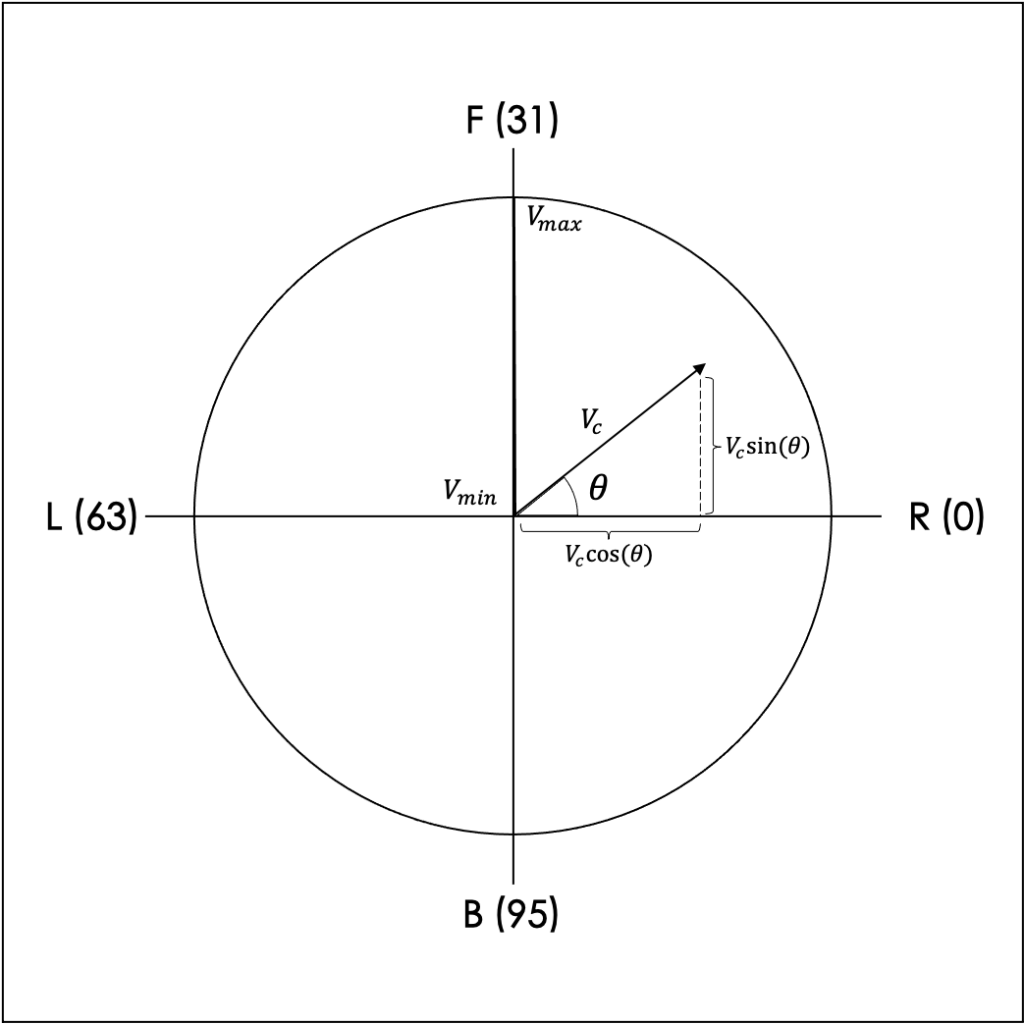
This week I focused on getting the work done for the mechanical system of the vehicle. I was also able to finalized the parts order and complete the CAD modeling of the vehicle systems. Most of the other work this week was getting the system to allow the car to move. This meant writing a good deal of the Arduino code and testing the circuits for the motors and the motor shield. As it stands the code is able to control all 4 motors with a discrete space to define the direction of the vehicle. In essence, the system controls the motors based on an angle and velocity provided by an external system (compute system) over serial communication. The angles map to various controls to direct the car in the direction of the angle from the horizontal. This is done by specifying a byte over serial in [0, 127] which maps to an angle on the unit circle. The velocity is currently fixed but in the future I would like to add the ability specify the velocity.
Since the parts arrived today I was unable to start the building process; However, will attempt to get at least one car built by the end of Monday this coming week.
As far as the next week plans, I would like to test my implementation of the vehicle control system with an actual built car and tweak as necessary. I think I would also be a good idea to re-parametrize our final testing metrics/specifications based off how the car performs on a simple track test. In conjunction with this, I would also like to start development on the wireless communication platform. More specifically, developing a framework to allow the various portions of the project to coordinate in a ROS environment.