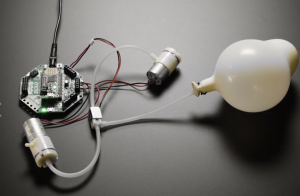
This week, we ran into a lot of technical issues that we managed to mostly solve by the end of the week. Omar is in Florida and needed to SSH into the Xavier to run code simulations. With the help of the best TA Abha, we managed to successfully set up port forwarding and allow Omar to SSH into the Xavier remotely. Hojun constructed a prototype of the gripper and was able to grab pencils and screwdrivers. Unfortunately, one of the air pumps that we needed for testing was dead on arrival and we are waiting for the newly ordered one to come in to continue testing the full gripping system.
Omar was able to SSH into the Xavier at long last but also tested his own RC car fitted with the depth camera and IMU with the RTABMAP SLAM algorithm. The algorithm worked but required too much tuning and computational time so he decided to switch to the ORB SLAM method which is faster and more efficient. He also got to use the gmapping ROS package to generate a 2D occupancy map on the turtlebot3 simulation but is working on solving the nosier feed from the actual real life turtlebot3. He also helped Andy with color thresholding fine tuning and setup.
Andy managed to fix some of the segmentation of contour drawings on his color thresholding by fine-tuning the HSV ranges for pink neon tape. Additionally, he also changed the frames to have taskbars to adjust the ranges, draw the contours based on total area to reduce segmentation and miniscule false positives, and label each contour with the centroid coordinates. He also was finally receive the Kinect camera and get it outputting RGB and depth output while connected to OpenCV on Ubuntu/Linux.

Next week, our team hopes to present out progress better at the weekly meeting by making a powerpoint and outlining what we accomplished this week in more detail. Additionally, we want to continue fine-tuning the color thresholding and adding better contour drawings/bounding boxes, integrating the Jetson Xavier onto the physical robot, run SLAM testing, and finish constructing the full air pump gripper system to test on tools. (Prep for Demo!)