To elaborate on last week’s status report, we decided on the iRobot base because we realized that our original project scope was too big for our budget and capabilities. So we decided to shrink our robot down by choosing a smaller robot base that is within our budget and easier to learn. I plan on ordering the iRobot Create 2 robotic base this week and during the week I have read and watched many tutorials on programming the motor controls of the robot.
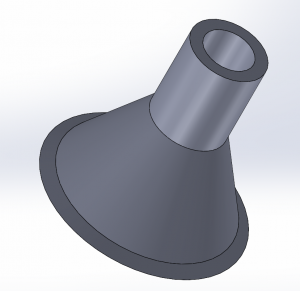
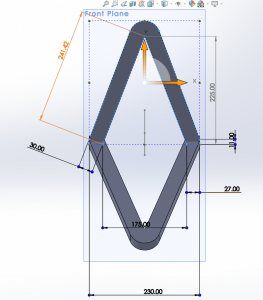
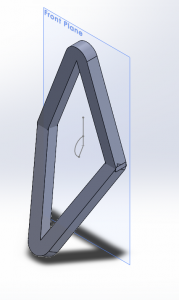
This week, I got started on learning and drawing up the CAD files for the parts that we would have to make ourselves such as the arm and the funnel for the gripper as shown below.
I also noticed that all the tutorials for the iRobot used microcontrollers like an Arduino, so we decided to add that to our parts list as well. My group worked together to finalize the parts list and got started on requesting materials that we could use from the existing parts list on canvas.
For next week, I plan on finalizing the CAD files with assembly and hopefully get started on programming the iRobot if it arrives by then.