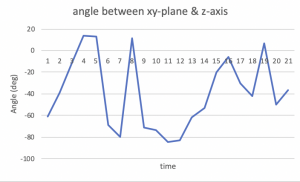
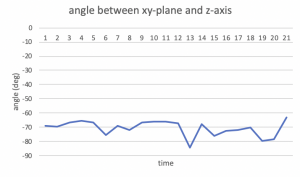
This week, I realized that using the phase of the accelerations as a feature can be problematic because it depends on the orientation of the device in the pocket. I was using the angle between the xy-plane and z-axis, but the axes could change if the user puts the device in different orientation. It could also lead to inaccuracy if the orientation of the device changes when the user moves. To handle this problem, I decided to use the change in phase over time instead of using the actual values of the phase.
Also, I added the magnitude and phase calculation to the code instead of doing it manually on excel for feature extraction. This was done to prepare for the integration with the RPi, as we would not be able to move the data received from the RPi to excel and do calculations there.
In terms of schedule, we are still on track.
After spring break, I will continue collecting more data and I hope to start getting data from the RPi and integrate them together.