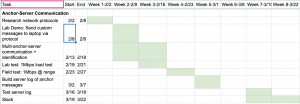
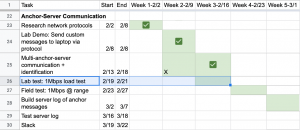
This week, per the desired deliverables laid out in our team’s Gantt Chart, I successfully tested and demonstrated multi-anchor-server communication on February 17th. Unfortunately, I do not have video footage. Shortly after completing that deliverable, my second Raspberry Pi malfunctioned and became unable to connect to my local WiFi networks. From February 18 through 19, I tried and failed to trouble-shoot this problem. It is still out of commission and so I cannot demonstrate multi-anchor-server communication because I do not have multiple functioning anchors.
As a result, I am currently behind on my next main deliverable: a 1Mbps load test. I switched gears on February 20 and started writing code for the load test on a single Pi, but it needs to be debugged.
The Gantt chart will need to be redesigned this week. Rhea’s illness has caused her to fall behind. Because my own work on anchor-server communication has only been slowed down by faulty equipment, I will be moving to assist Rhea with her work on tag-anchor communication:
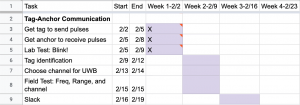
As a result, the deliverables I want to accomplish in the next week are getting the tag to send pulses and the anchor to receive pulses. Once that is taken care of, I will be using some of the allotted slack time on my own schedule to catch up on the 1 MBPs load & field tests.