This week we re-organized our rest of semester plan once again. Due to our advisers insisting we stick to executing our hardware plan.
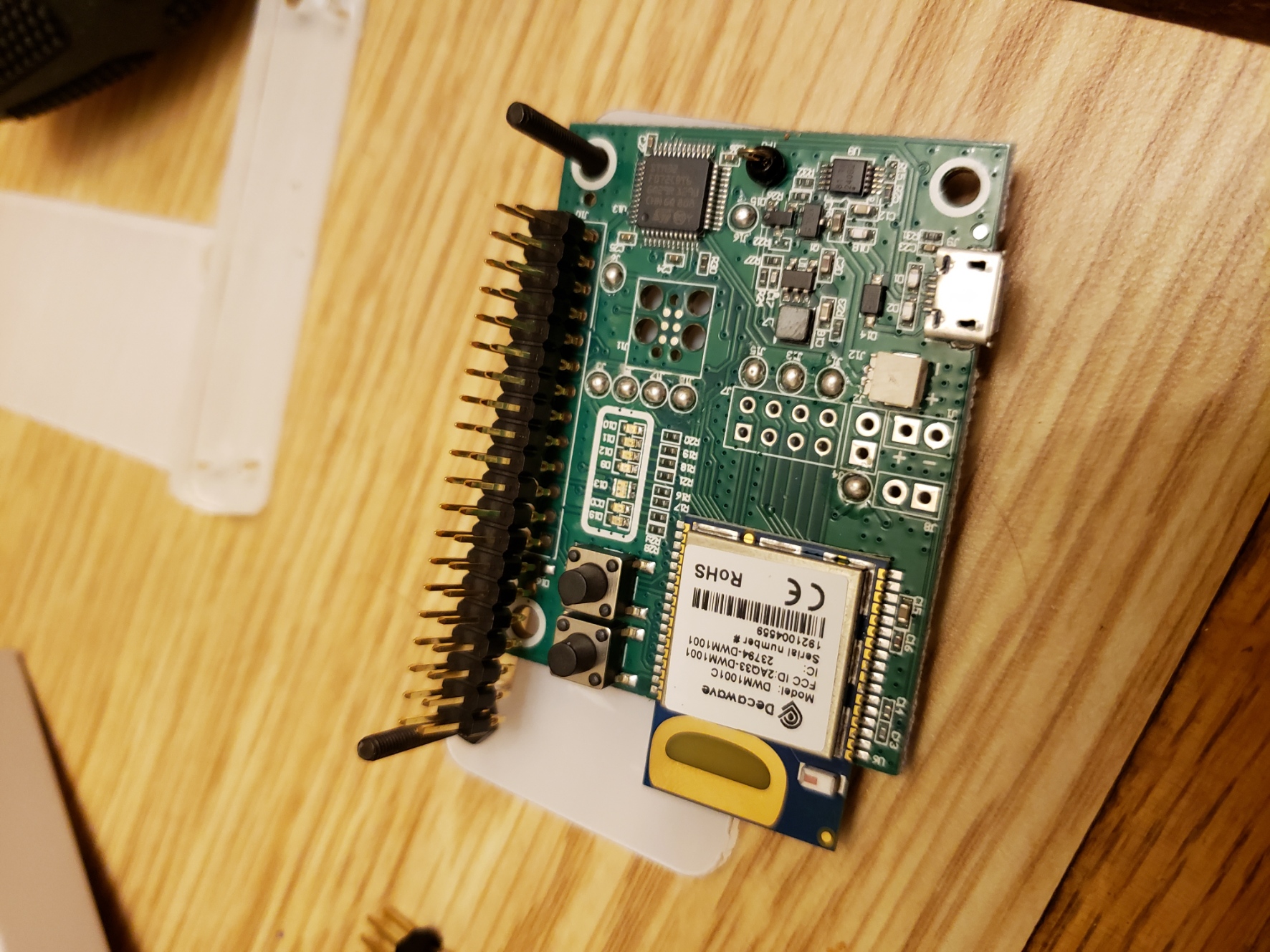
Due to working from remote, we needed to find solderless headers which we had shipped from the UK. We are still awaiting our shipment of RPi4s.
Shiva was able to debug and fix the overflow issue he was having. He will take over figuring out the MCU–RPi interface portions from Rhea and run some tests to ensure consistency in measurements between anchor and tag.
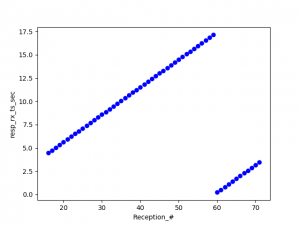
Udit finished writing an ideal hardware timestamp simulator in Python.
Rhea and Udit spent the week reading 5+ papers on TDoA. The approaches that were considered were Iterative Hyperbolic Least Squares, Maximum Likelihood Estimator, Pseudo-Ranging, Weighted Delta-Range, Gauss-Newton Position Estimation, and Kalman Filter Smoothening.
We will be finalizing our research based on these approaches and picking a final approach to take by Monday. We will implement these algorithms and test them using the hardware simulator (we will add in artificial hardware sampling and radio error) to get a clear idea of what accuracy we can achieve with different hardware errors. These will be used alongside the real measurements Shiva collects for Radio Delay to tell us how accurate our time-sync error must be.
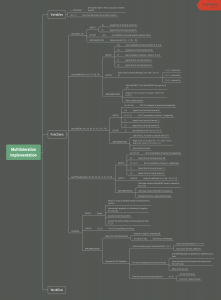
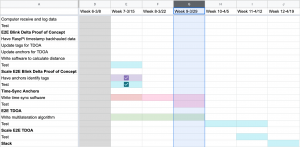
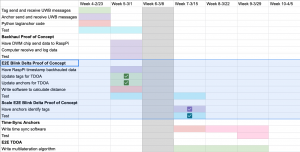
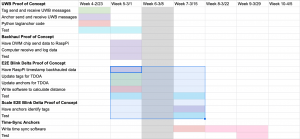
Here is the updated Gantt Chart: