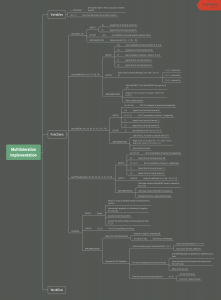
At the beginning of the week, I worked on implementing an ideal multilateration algorithm in Python, based on https://en.wikipedia.org/wiki/Multilateration#Cartesian_solution_with_limited_computational_resources.
After Wednesday, based on Tamal’s concerns with our hardware implementation, I switched gears. I passed the multilateration software over to Udit for him to finish implementing and returned to the Decawave hardware to identify key metrics and details of how it tracks time.
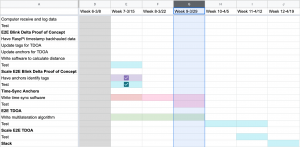
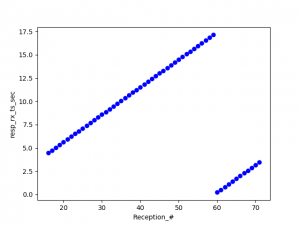
From Wednesday through Saturday, I verified the conversion rate of Decawave time units to real-time seconds (1 DTU ~= 15.65 ps); identified the issue of timer rollover (the Decawave chip timer rolls over every 17.2 seconds), fixed the TDOA software so that the anchor now correctly reads the timestamp of pulse reception; implemented time conversion so that the software can display and log the timestamp in seconds, microseconds, and nanoseconds; and wrote a Python script to graph a single anchor’s measurements of when it receives pulses from a single tag.

Progress is still on schedule, though we’ve had to change some responsibilities around due to the COVID-19 crisis. In particular, Rhea and Udit are now working on the multilateration software. For next week, I will verify the accuracy of the Decawave chip timestamps, then collect sample timestamp measurements using the Decawave chips at various distances to plug into Udit’s simulator.