This week, our team shifted it’s focus to gathering as much data as possible, making steady improvements, and putting together a presentation for Luca to deliver next week. Our device is functioning, but not without it’s hitches. Dan spent the majority of this week recording trial data and trying to adjust for accumulating errors as the Photon continuously polled the IMUs. He found that as the device stayed on for longer periods of time, the quality of the data began to deteriorate as if the IMUs were being overclocked. That’s why he has been leaving a set period of downtime between each consecutive reading. Despite these errors, however, he has been able to accumulate some good data.
Luca worked with Dan to detect ball release using the gyroscope angular velocity y from the second IMU (on the finger). He then drew the traces at the throw so we can see where the ball is released on the figure. He also calculated the Vx, Vy, Vz as well as the theta_x, theta_y and theta_z at the throw time stamp. Moreover, he found a significant bug in our code. For the last few weeks, we have been accidentally using accelerometer data for the gyroscope computations. The traces now look very different but the shapes make sense. Finally, he made some changes to the simulation.
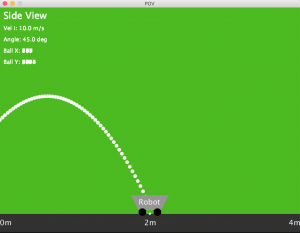
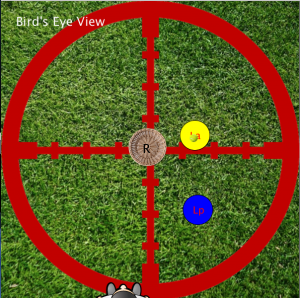
Hana has been working on developing the side view simulation and combining it with the existing bird view. Given the inputs of handHeight, vertical angle, and vertical velocity, she’s been able to show the ball’s trajectory from its launch point. She’s also been working on having the two simulations start at the same time side by side on the same screen. On top of that, she’s been adding visual effects to make the simulation look like real life as much as possible.
0 Comments