This week, I spent most of my time trying to record sample throw estimation data with a basic measurement setup and our existing simulation. I discovered that with successive trials, the IMUs began to report increasingly poor data. Thus, what would begin as clear parabolic data would eventually become something resembling a flower by the end of my trial runs. I reasoned that my constant polling at 50Hz may be wearing down the IMUs so I decided to leave a 10 minute period between each trial run.
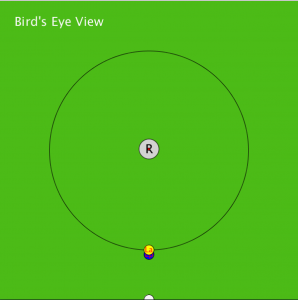
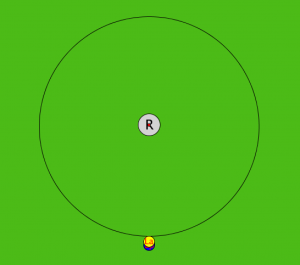
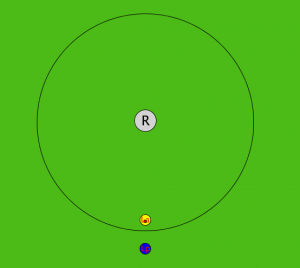
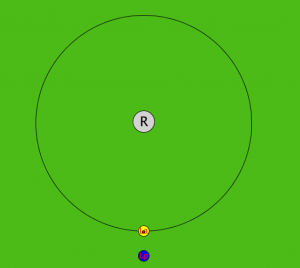
Despite these issues, however, I have been able to achieve some really solid estimation data. I included 4 images showing two successful throws and two unsuccessful throws. The current trend appears to be that throws near the range of 1m have the best accuracy with our predictions and that anything exceeding that usually causes something off to happen with the AHRS because I’m moving my arm much faster.
I also spent a significant amount of time working with Luca on the estimation accuracy as well as on the slides he’ll be presenting tomorrow. We agreed that it would be best to have the robot begin 1m away from the user since that’s the optimal throwing range. In addition, we found that removing the first half of the data from most of my good trials still gave us a reasonable estimated value. This is an extremely valuable find because it allows us to lower the computation time (leaving more time for the simulated robot to catch the ball).
(The robot’s position and catch radius are incorrect in these simulation pictures. This has since been fixed)
0 Comments