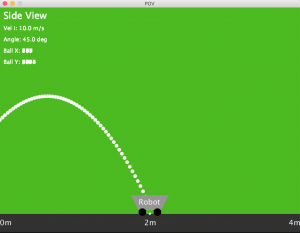
This past week I’ve made significant progress on the simulation front. I worked on getting the side view working given the inputs of handHeight, vertical angle, and vertical velocity. This allows the viewer to get a much better sense of how the object is moving in time. I was able to successfully show the ball’s trajectory over time as it moves through space. The picture below is an example of it falling into the robot seamlessly. As I move to combine it with the Bird’s eye view simulation, I’ll have to change a few aspects. I will no longer by printing the ball’s x and y position in space as it moves as Processing was unable to update and print it at the moving rate. Additionally, our specifications have changed such that the user will be 1m away from the robot, not 2m as displayed below. Also, the velocity and time travelled needs to be scaled such that it matches with the Bird’s eye view such that both views show the ball leaving the hand, traveling, and landing at the same time.
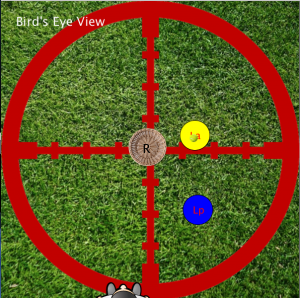
For the Bird’s Eye view, I worked on making it as accurate and realistic as possible, including updating the visuals such that it looked like actual objects moving through space.
 https://drive.google.com/file/d/11rklUP-D6l0ZAkGDA9gsHWZzuKfPuDqr/view?usp=sharing
https://drive.google.com/file/d/11rklUP-D6l0ZAkGDA9gsHWZzuKfPuDqr/view?usp=sharing
In the next week, I will be working to make the simulation as realistic and seamless as possible. Should be fun.
0 Comments