I started the week by working with Dan to detect ball release using the gyroscope angular velocity y from the second IMU (on the finger). A throw is detected if this value is smaller or equal to -5. We determined this threshold through experimentation. We don’t want the threshold to be too low, otherwise a throw would be falsely detected when the arm swings. Additionally, we don’t want the threshold to be too high, otherwise the throw is not detected.
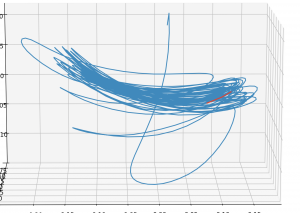
Using the new dataset, I drew the traces at the throw so we can see where the ball is release on the figure. I also calculated the Vx, Vy, Vz as well as the theta_x, theta_y and theta_z at the throw time stamp. I calculated the angles using the rotation matrix at release.
Moreover, I found a significant bug in our code. For the last few weeks, we have been accidentally using accelerometer data for the gyroscope computations. The traces now look very different but the shapes make sense.
After Dan collected data of several throws, we inputted real data into our simulation. We still have work to do on the 3D positioning but the predicted landing locations are not too far off compared to the actual landing locations. One problem that has come up is that after Dan records data of several throws in a row the accuracy of the IMU data seems to decrease. We are not sure what the source of this problem is but we are looking into it.
This week, I have also worked on the simulation. I had to change some dimensions. The circular catching range of the robot now takes up the size of the whole main view screen. Additionally, the user is now shown to be 1m away from the starting location of the robot instead of 2m. This is because Dan is having trouble to throw the ball far enough due to the photon wire being too short. I also set up the simulation to make space for the side view on the screen. Finally, I fixed a bug which was causing the robot to not return exactly at its starting location.
This coming week, I will incorporate the PID control system into the simulation and I will also work on simulating real world behavior. I will also work with Dan to perfect the 3D positioning.
0 Comments