This past week I moved a bit away from the simulation and focused my efforts on calculating trajectories for any data that I have been given from the IMUs. First I have set up some constraints on the data. For instances such as where the angle in the Z (vertical) direction is less than 0, or when any velocity from the hand is negative, or hand height is below 2 feet, I am counting this as a bad throw. I will discard the data and instead await for an appropriate row. Now assuming that the data is appropriate and accurate, I’ve been applying these kinematic equations, taking the higher elevation into account:

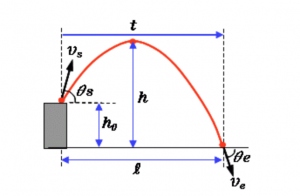
These equations allow me to calculate the the ball’s final landing location l. I am assuming that the user’s hand height will be taller than the final landing location, and that’s why these equations are a bit varied from standard kinematic equations. I’ve had some issues matching up the 3 projected landing locations in the X, Y, Z planes to a final 3D location that can go shown in the simulation. As a result I’ve been focusing just on the bird’s eye view of the simulation. I’ll be working in the coming week on making the landing location as accurate as possible and relaying the in the simulation, as well as figuring out the bezier curve control points for the drawn trajectory of the ball in the side view.
0 Comments