This week we decided that it would be best if I would focus on building the simulation part of the project. This is due to the fact we didn’t need all three members working on the Hand motion sensing aspect, and since Luca and Dan had a much better grasp of Kalman filters and controls, and I had previous Processing experience, I will be taking over building the simulation from this point.
While we currently don’t have real data from the IMUs, I will be building the simulation using dummy data. The data the simulation is expected to receive from each throw is the hand height from which the ball was released, the ball’s speed in X, Y, Z directions, and the ball’s angle in X, Y, Z directions (with respect to the user and the robot directly 2m away). This applies to the pre-throw and the actual throw. We are exploring the idea of having two pre-throws so that the simulation is as accurate as possible. In this case, I will receive the time between end of first pre-throw and end of second pre-throw, as well as the time between end of second pre-throw and release of actual throw. There will be a timer in the simulation and a count to display which pre-throw or actual throw is being conducted.
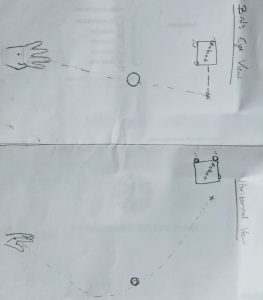
I’ve designed the simulation so that it will have 2 PoVs: a bird’s eye view and a horizontal view. The bird’s eye view will be as if a camera from above is filming the throw, and will show all lateral movement as the ball travels out of the user’s hand, and how the robot will move to the left/right (with respect to the user) to anticipate the landing location. The horizontal view will show the parabolic trajectory of the ball as it moves upwards from the user’s hand and downwards due to gravity. It will also show the robot moving forwards/backwards (with respect to the user) to anticipate the landing location. The 2 PoVs will be shown side by side and the ball will move across the two screens in unison. This will essentially give a 3D view of the ball traveling, and if given more time, I will look into some libraries to give it an actual 3D feel. At the present I’m currently working out the equations to how the ball travel along an arc in Processing given the inputs. I’ve attached an image of what I imagine the simulation will look like by next week.
0 Comments