- Created a table, listing all of our design decisions
- For each decision, we specified why we chose it, alternatives we considered, why those wouldn’t work and how/why our solution is better
- Did more research to figure out specifics of our implementation
- Width and shape of our track given the dimensions and motions of our vehicles
- As a team, we decided on how our cars would look like and what camera would be best for our project
- Ordered our parts and starting to work on the hardware pieces that arrived
- Our progress is what we expected to accomplish in the timeframe
Proposal Presentation Slides
Introduction and Project Summary
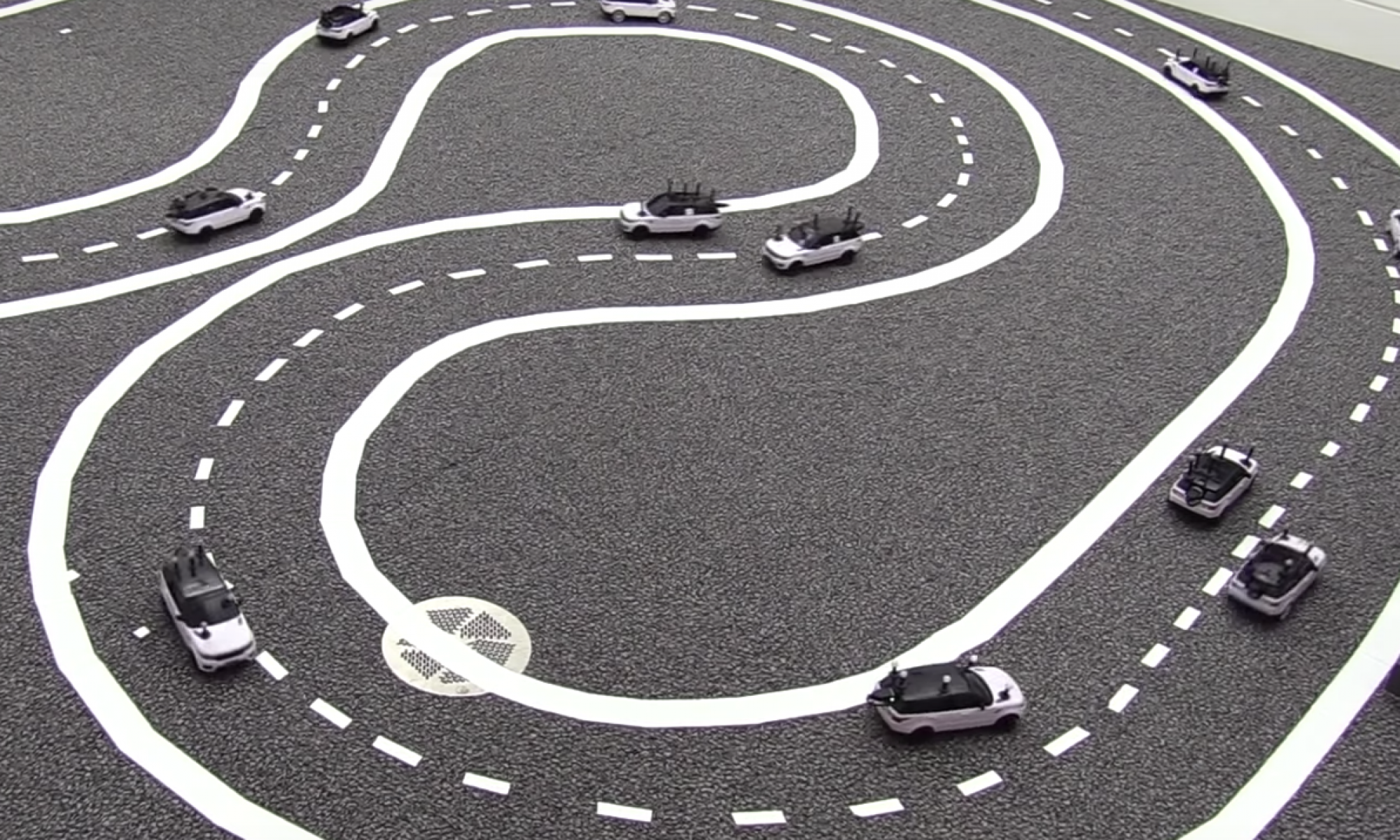
The goal of our project is to simulate and measure the effect of vehicle to vehicle communication – between autonomous vehicles – on road traffic. There has been a lot of research on autonomous vehicles that can sense their surroundings and take action based on their individual sensory input, but we seek to experiment with a setup whereby all the autonomous vehicles cooperate with each other to bring about coordinated traffic and increase throughput. Given our financial limitations, we will only experiment with a contrived setup involving about 6 robotic vehicles and a figure-8 track. We will apply a hitch to the traffic in our contrived setup (such as the halt of one of the moving cars or an obstacle on the road) and compare the throughput between the cooperative and non-cooperative approaches.