controls vehicle movements based on othetor vehicle locations and cooperative strategy
Current fairness strategy prefers vehicles from a longer queue but can scale to a more complex strategy given a set of features.
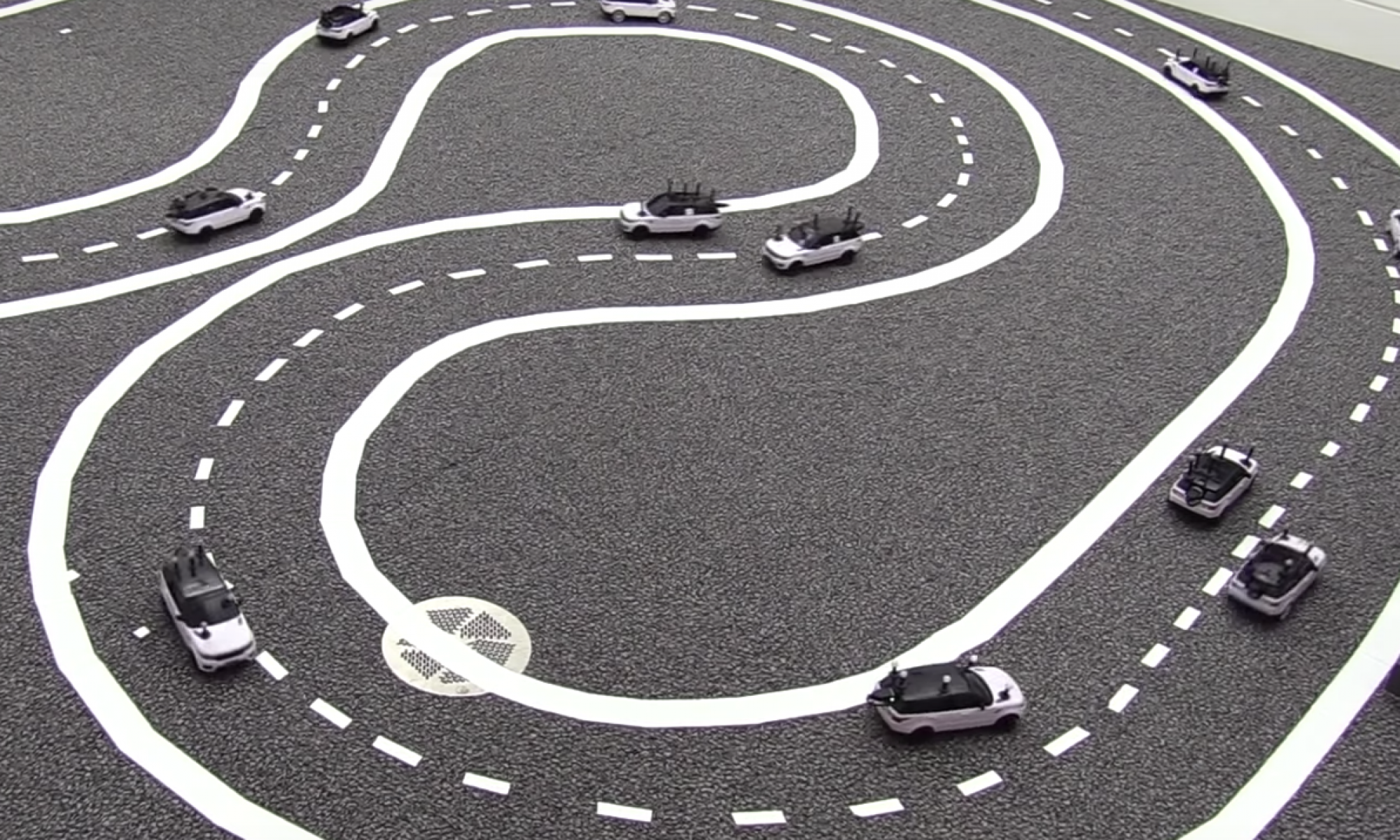
Environment continuously selects a single vehicle to pass through the intersection (of a figure 8 track)
Path planning class allows for a different number of cars on either track
Integrated path planning class with graphic simulation so that at every time step it takes as an input the vehicles on the track and updates their locations.
Tested performance of graphic simulation with PP class and it seems to work fine
Fixed a bug where certain cars could pass through other cars
TODO
Incorporate vehicle acceleration/deceleration to allow for smoother movement as opposed to the vehicles coming to an abrupt stop.
Investigate better fairness strategies to decide vehicle to pass through the intersection