- Revised/finalized design report
- Did more research on power issue and came up with a solution for the scope of our project
- After testing power on each part, decided to have different power supplies for NodeMCU and L298N driver so enough current would be available for the Wifi connection
- ordered more parts to test interacting with multiple vehicles
- Was able to control vehicle’s motors through a Python server
- Connected NodeMCU to same WiFi network and controlled motion by byte commands
- Was able to do so without glitches or power issues
- Able to get an upper bound communication latency time
- Progress is as expected
- After spring break when the parts come, will begin testing motion with multiple connections and multiple vehicles
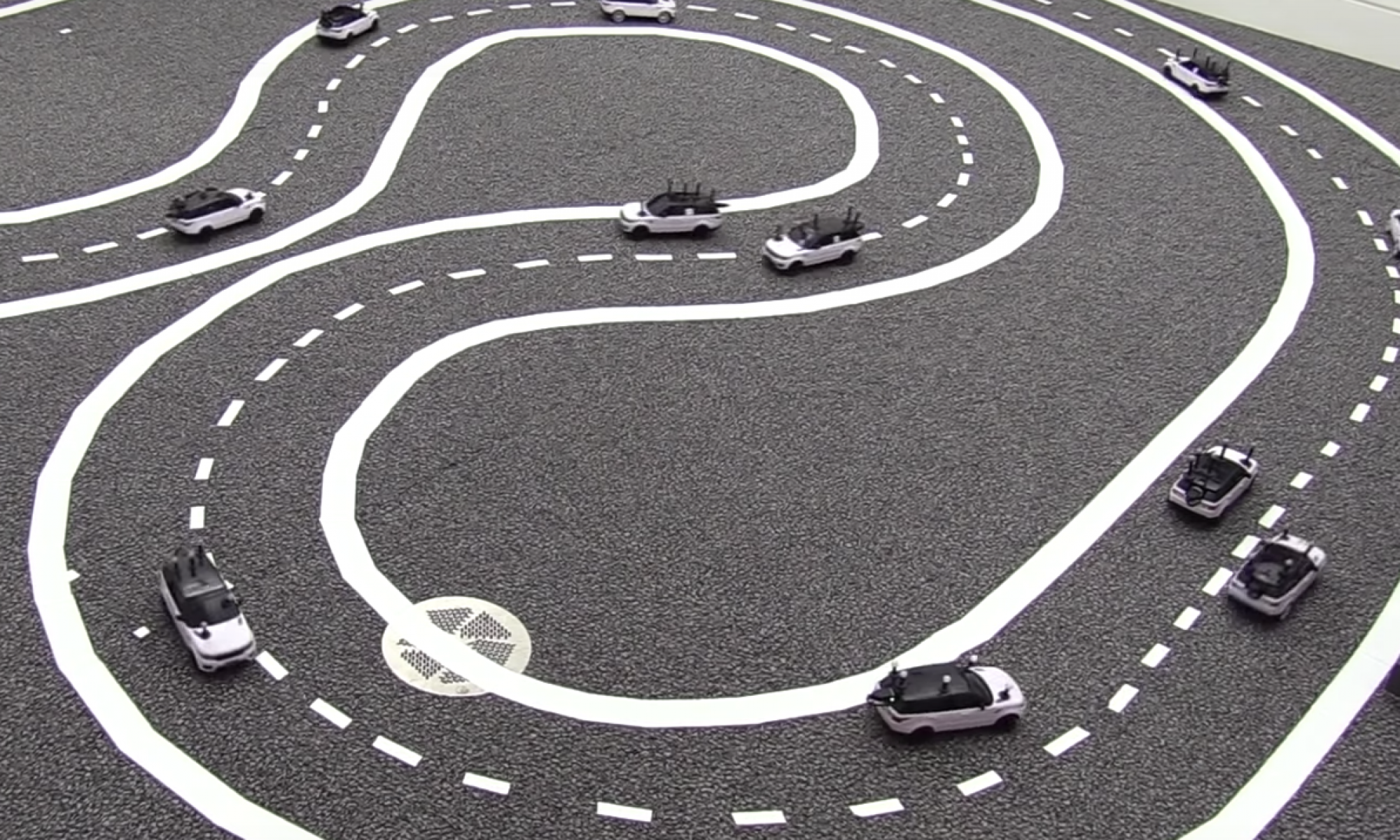
Team A1: Cooperative vs Non-cooperative Autonomous Driving
Carnegie Mellon ECE Capstone, Spring 2020: Kylee Santos, Tito Anammah, Serris Lew