- Continued research on Intelligent Driving models
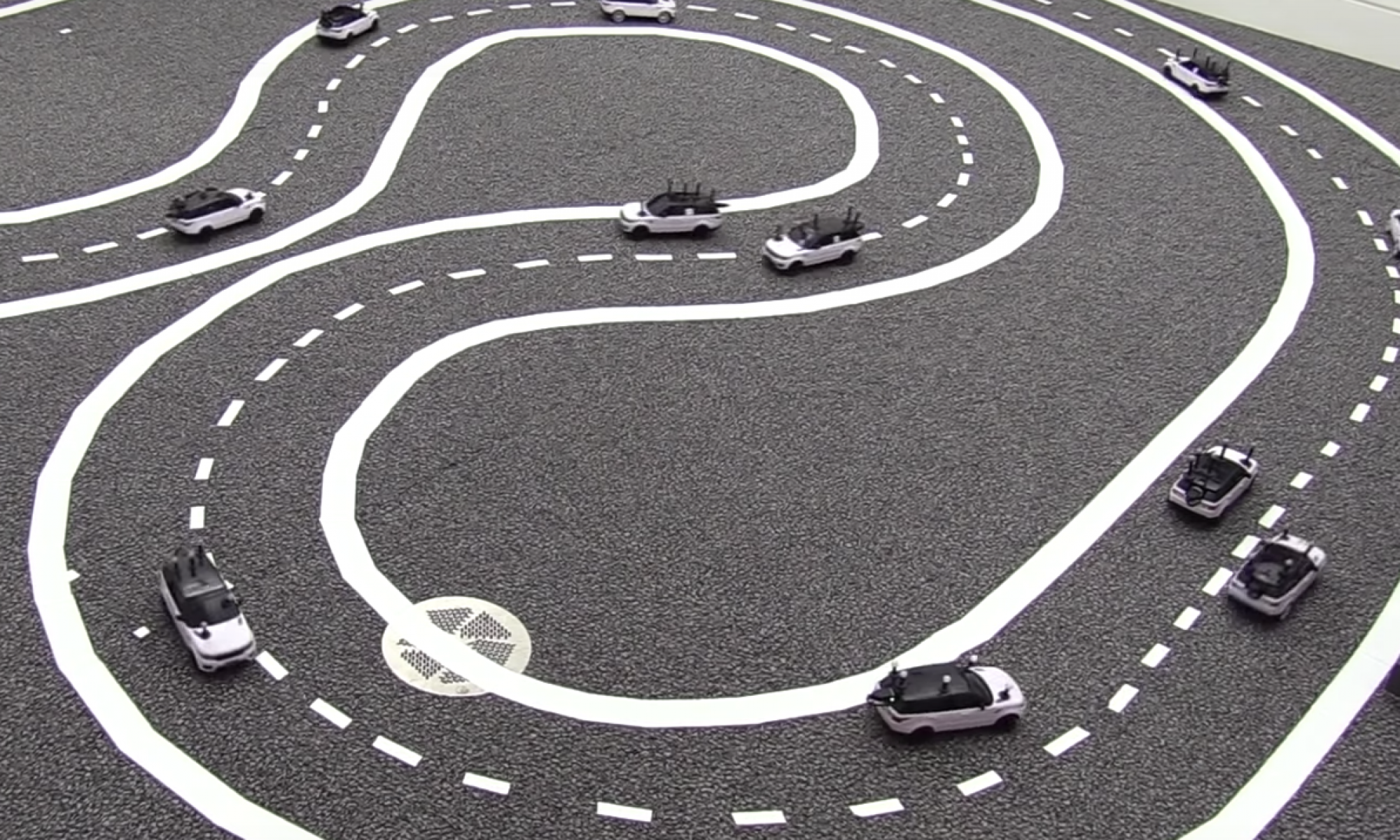
- Refined demo idea from two lane circle to figure 8
- Did calculations to determine sizes of track and lanes as well as the speed of vehicles.
- Created and filled out design decision document
- Wrote basic Arduino code to control the robotic cars through WiFi using the ESP8266
Team A1: Cooperative vs Non-cooperative Autonomous Driving
Carnegie Mellon ECE Capstone, Spring 2020: Kylee Santos, Tito Anammah, Serris Lew