The biggest challenge that we are facing now is whether to use pure computer vision algorithms to do object detection and following, or should we introduce machine learning algorithms to it. And if we are using some object detection APIs we found (e.g, YOLO), to what extent should we rely on it. There are three approaches that we could foresee. First, we can solve the entire tracking problem by pure computer vision, and most likely to use affined Matthew-Baker algorithms. This could be challenging and might cost most of our remaining time. Second, we can use pure machine learning APIs and train our tags to have it work perfectly fine. However, this might be too easy for us to achieve because we are mainly solving the problem based on existing solutions and code. Third, we could implement of simple neural networks that can detect some easy shapes. We could use those shapes as identifier tags, and if we fill in colors, we can combine computer vision to enhance the detection process. Currently, we believe that the third approach is the one we want to spend most time working on. Since we are not using APIs and design our own convolutional neural network, we might need to change the schedule a little bit to give ourselves more time on the machine learning researching part.
During our discussion on which wheels to use, we decided to use smaller wheels. At first, we wanted to use three 6’’ Mecanum wheels for all three wheels. After our discussion, we believe that using smaller wheels can both save our budgets and lower the gravity center of the suitcase in order to better manage smooth paths and apply control more smoothly. We agreed to use two 4’’ Mecanum wheels that are connected directly to servo motors, and we will use another 4’’ omni wheel as the third driven wheel. We believe that this small change would not compensate our project and add more risks to it, and it can actually help us stabilize the entire system.
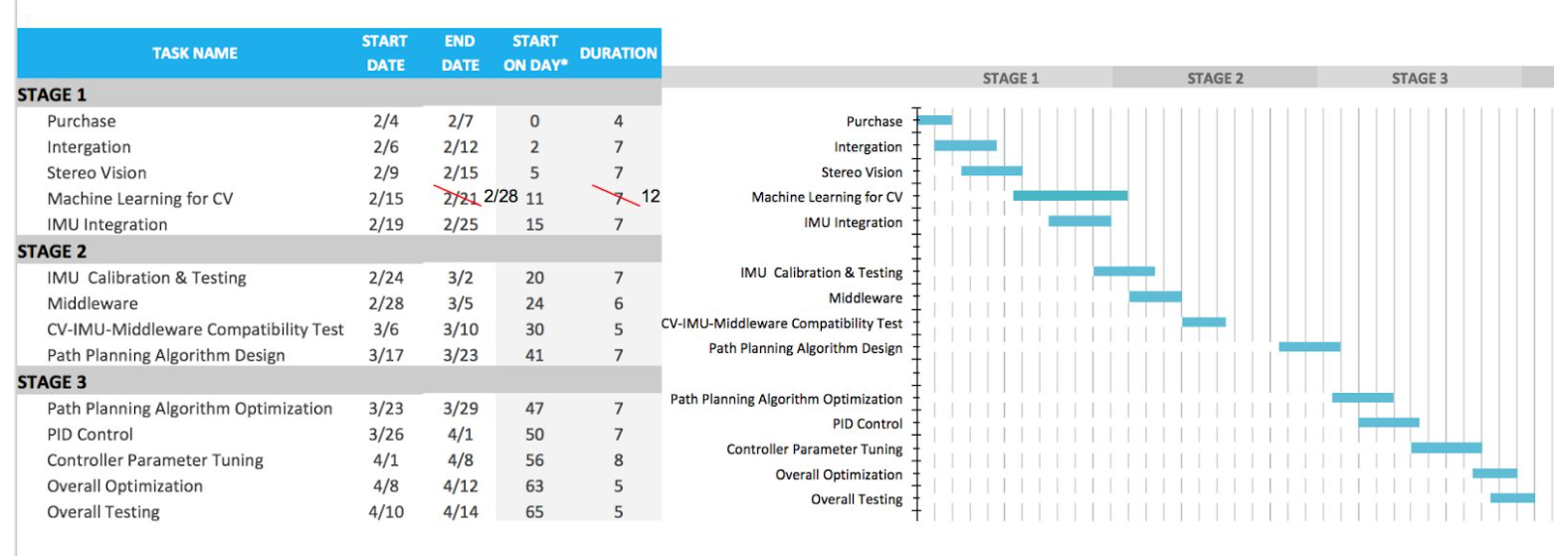
Attached is a new schedule.
0 Comments