
This week, we received our Stereo Camera module (NVIDIA JETSON NANO/XAVIER NX, DUAL OV2311 Monochrome Camera Module). I tested the existing phone detection algorithm which I developed last week, implemented with YOLO, on the new camera hardware. Initial tests indicated a slight drop in detection accuracy, with only 12 out of 15 tests successfully detecting the phone’s location. To address this, I am currently retraining the YOLO model to better suit the parameters and specifications of the new camera setup.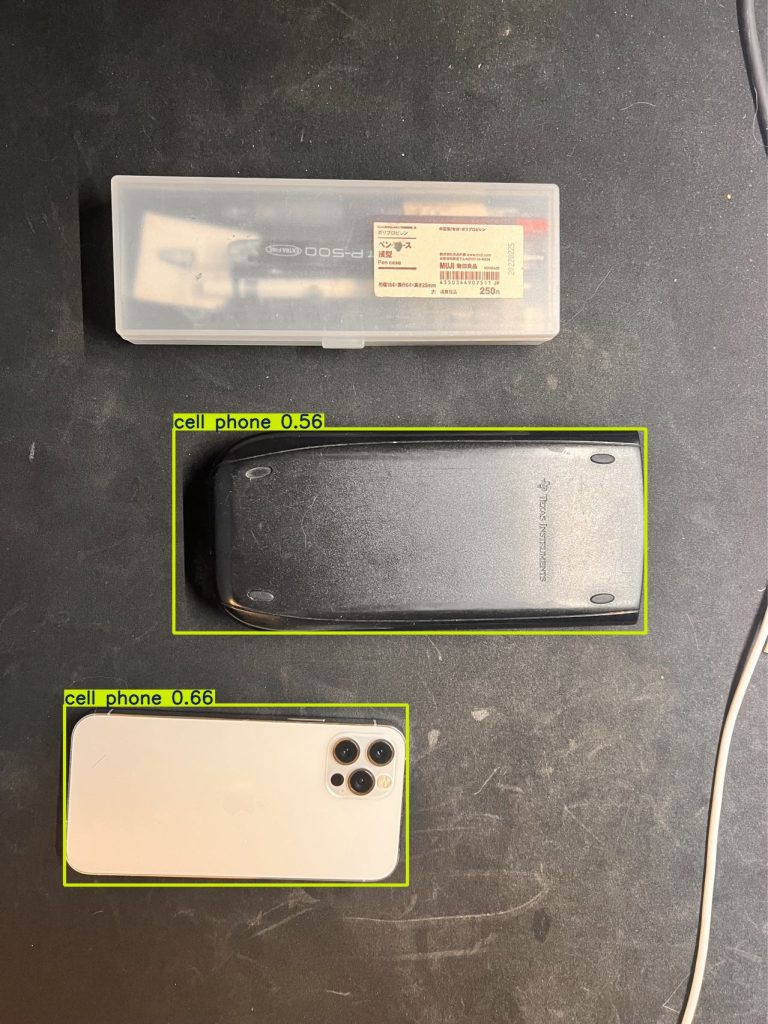
(As shown above, the current Yolo model detects the calculator as an cell phone)
Next, I finished the project’s ethics documentation, focusing on our commitment to public health, safety, and welfare. This report outlines the ethical considerations for the smart charging table, ensuring that we adhere to necessary standards.
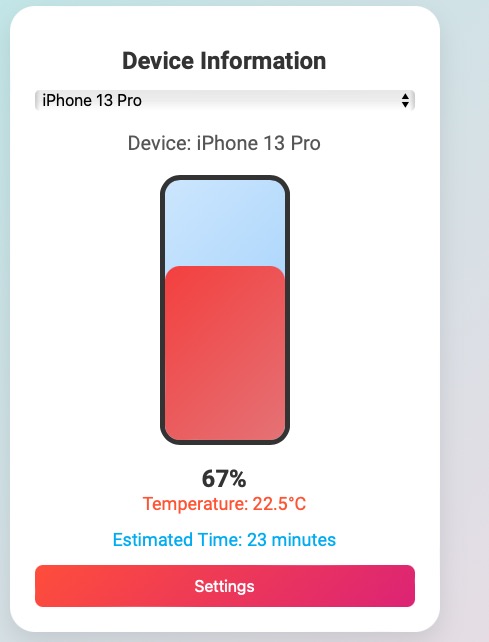
Then, I improved the software app by integrating the Phone API. Before, I have designed the UI of the software, but the values shown is a preset values. Now I have successfully call the iPhone API to demonstrate the device information, which allows the UI to display actual phone temperature and charging status instead of using preset values. The update offers a more realistic demonstration of the charging process.
I am currently on schedule with our project timeline. Each milestone this week has contributed to refining the system’s functionality and user experience, ensuring that our project objectives are met.
Next Steps:
Continue Training the YOLO Model to improve detection accuracy with the new camera.
Further Test and Validate the Updated UI, ensuring data accuracy for all phone models.
Collaborate with the Team to begin designing the gantry system with the camera-based detection system, ensuring seamless communication with the central unit (Jetson Nano) once all our parts arrived.