As of today, we finalized our proposal for the presentation next week. This involved several kinematic models which we created earlier in the semester to better quantify our requirements.
One of the most significant risks we predict for our project is its ability to perceive the target and activate propulsion with minimal latency. We anticipate that the system will need some time for movement in between perception tasks (receiving and processing a signal from the target). The device may not move fast enough if the perception tasks are to close in time. We will manage this risk as we write the software for these perception tasks. This pause will be something to take into account when programming the device. We will also make sure directional antenna signal processing will require a small compute time. Our contingency plan would be to switch our perception method to computer vision, to detect visual markers on the ground.
No design changes or schedule changes have occurred yet.
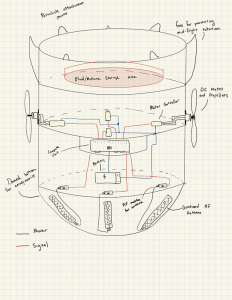
Below is a drawing of our preliminary design: