I continued to work on the CAD modeling this week for the housing, as well as getting the motor and controller test working. From our test, the results have shown some improvements that need to be made to the design, where our motors are mounted. In order to make enough thrust to move, there needs to be a significant amount of space between our motors and the housing. Also our motor controller needed to be factory reset and have the throttle range calibrated in order to work correctly. I did some research into alternative methods of perception, in the event that our antennas do not work as intended. So far, thermal cameras seem like a potentially promising idea, as they have low resolution for low processing time, and do not require infrastructure or daylight to work, because of the heat of a body or fire/flare. So, I did some research looking into them and specifically the FLIR Lepton camera that could potentially work with a big/hot enough source like an open fire (or for testing a heat gun/heating pad) . So far we are right about on schedule, but the CAD design is not finalized yet because of our recent findings on motor thrust. By next week I would like a relatively finalized CAD design ready and hopefully have it printable/ready to be 3D printed.
Lahari’s Status Report for 10/9/21
This week I spent time working on the pretests and the design document. For the design document, according to feedback I adjusted the block diagram, because I forgot the motor controllers in the presentation. We did a drop test and a test of propeller thrust to conclude our pretest phase.
The drop test gave us an idea of the amount of time available for onboard computations and movement. The propeller test would verify the 1kg thrust metric from the product listing. We put together the parachute and the weight and headed to the Pausch Bridge, where I released the items from the top, while Vikram waited below to retrieve and ensure no passers by. Daniel filmed from the street exit on the fifth floor of the Gates Center.
The propeller test was somewhat successful, though we had some problems with the PWM generator while getting started. All in all, we completed the tasks on our schedule that require our combined attention. My individual task during this week and going into next week involves digital filtering of the RSSI data we collected last week.
Daniel’s Status Report for 10/2/2021
This week, in preparation for our Design proposal presentation (which I will be presenting), I helped with some of the content on the slides while also preparing what I should say. I wrote notes for each slide in the form of main points, and rehearsed the presentation multiple times. On the technical slide of the project, I helped program the ESP32 board, and connect it with our new directional antenna to find out if direction sensing can work using our approach. This involved setting up the Arduino IDE to work with the ESP32-CAM board, and using the WiFi library to gather RSSI data.
I helped run some preliminary sanity checks indoors to see if the Antenna was behaving as expected. We then moved outside where I helped collect the RSSI data for different test cases of our antenna (such as different angles of the WiFi beacon from the antenna, different distances from antenna, as well as orientation and tilt of the antenna). I then moved this data to Excel and plotted it to find out if there was a discernable peak in one direction so we can use it for direction finding. We ultimately found that there is a peak of signal strength of around 30 degrees when the antenna is placed horizontally, and that it had enough resolution such that we could tell the RSSI peak from around 30 feet away until right up to the antenna. Now that we have obtained this data, I am starting to think about the specifics of the propulsion algorithm that will take the antenna’s RSSI data to output various PWM values for each of the motors. My team also suggested that we may need to consider a filter to pre-process the data.
When the parachute and motors arrive next week, we will begin testing drop speeds, motor thrust as well as do additional testing on the antenna in different configuration
Vikram’s Status Report for 10/20/2021
This week, I worked on the design of certain aspects of our project. Specifically I focused on the new CAD model of our device, using some of the specific components that we ordered like motors, propellers, controllers, and raspberry pi zero. I also added some of the housing design elements we proposed, like a domed bottom for aerodyamics and fins to help stop spinning. This CAD model will help us get a better idea of how everything will fit together, and the physical design that will be 3D printed. In addition, I helped edit the design presentation, and added in figures and drawings that are useful to help illustrate and exaggerate points to the viewers. We also developed a test fixture together and ran some pre-tests to see if the directional antenna is a viable option for direction finding. Our initial results are promising, but further testing is required in order to truly determine how reliable direction sensing with the antennas will be. This progress is in-line with our schedule, and as long as the antennas remain viable this will put us in the correct position for next week, as long as the parachutes and other items arrive on time. In the next week, I hope to have a drop time test completed, as well as more antenna testing and if possible (will happen last or the following week probably) at least 1 motor drive test, in order to measure approximate thrust.
Lahari’s Status Report for 10/2/21
This week I helped with the slides for next week’s presentation and the pretests we conducted over the weekend. I created a block diagram using a third-party software and redid our Ghant chart in response to the feedback we received during proposals. I set out to be as specific as possible at this stage of the project, given that we have developed our device design more according to the specs of some of our parts. Over the weekend we integrated the directional antenna with the ESP32 board. We then took several measurements in the grassy area outside Hamerschlag Hall, to check the RSSI measurements.
We were unsatisfied with the direction finding algorithm we proposed earlier. The previous idea was to move in the direction of greatest RSSI by maximum value. After I researched the RSSI quantity further it is actually feasible to get the exact angle of the direction then vectorize that quantity among the three propellers we will have. This will add more precision to the programming portion of this project, with very little added computational complexity. These and other more descriptive tasks were determined this week, like the need for a digital filter. We plan to do more pretests in the coming week when our parachutes arrive.
Team Status Report for 10/2/21
This week we prepared our design presentation and continued to order parts. Our design presentation consists of much of the introductory information from the proposal, with a few updates. For example, we updated the schedule to be more detailed because we had a better idea of our tasks. We created a block diagram based on the parts we ordered and our integration plan.
We researched and ordered more parts earlier this week including a 4-pack of motors, 16-pack of propellers, 4 ESC controllers, bullet connectors, and a 2-pack of parachutes. This makes up a bulk of materials, not including a housing unit to put them inside of. We received the Wi-Fi board and after some delay, we finally received the antenna we ordered last week. We ran some pretests on the antenna and board and determined the directional antenna was usable for direction finding. A problem we saw with the RSSI data we collected was considerable noise. We plan to use a filter to remove it, so we will research RSSI filter design in the coming week.
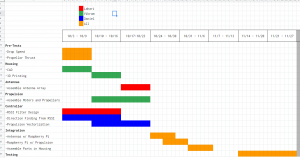
Because of the delay on the antenna and a few other parts we are still waiting on, we have adjusted the schedule. Our pretest phase will continue into the week of design presentations. We hope to verify some important metrics during this time, namely, drop speed with the parachute and thrust of the propellers.
An updated schedule and CAD model is attached.