What did you personally accomplish this week on the project? Give files or photos that demonstrate your progress. Prove to the reader that you put sufficient effort into the project over the course of the week (12+ hours).
The first half of my week was dedicated to the project proposal. On Sunday, I spent a large part of the day preparing the presentation slides. When we found out our group was scheduled for Wednesday, I took advantage of the next few days to continue practicing my presentation.
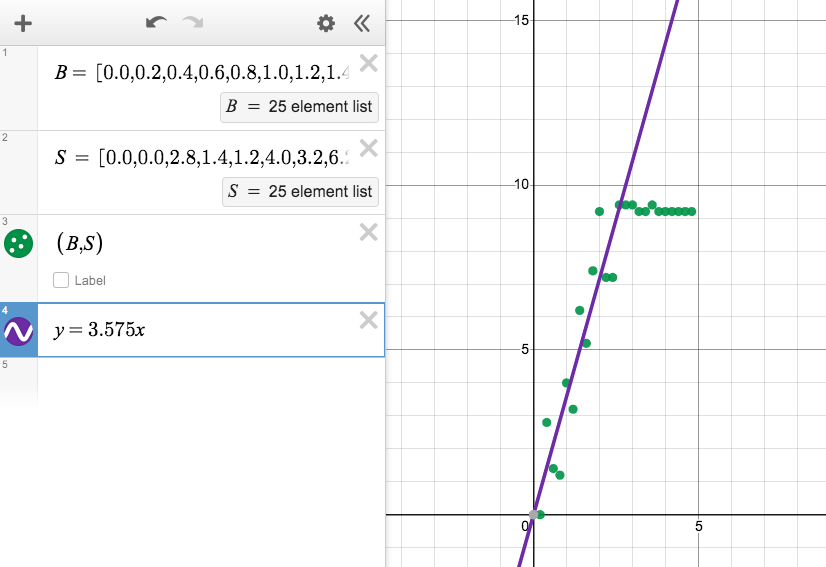
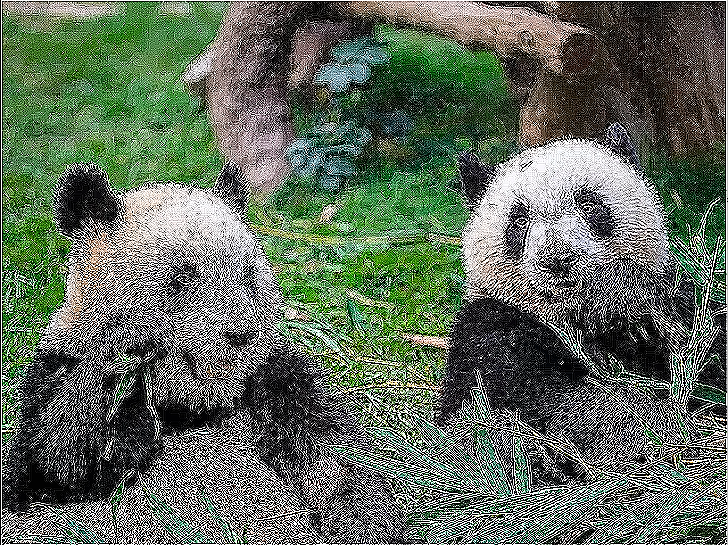
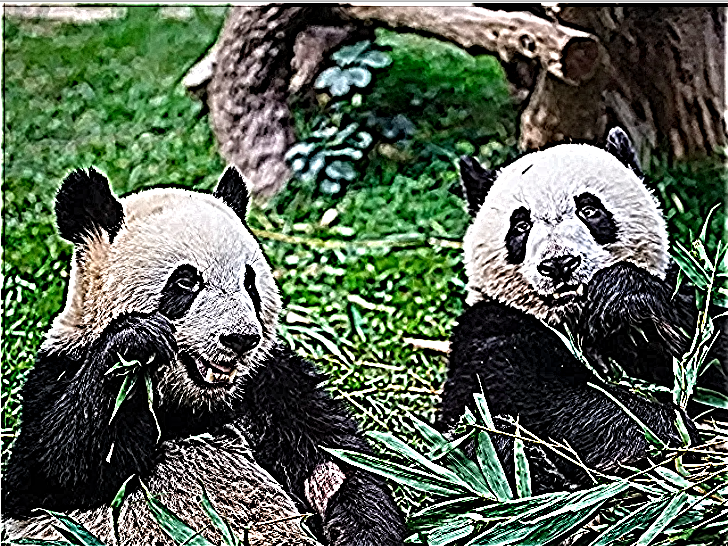
After the presentation, I worked with the group to finalize our camera order. We attempted to be as thorough as possible in researching cameras because these are the most important of our hardware setup. I spent the last part of the week researching image editing. My main task for this week was to develop the basic image processing algorithms and heuristics, but I realized I knew less about this topic than I had thought. I began by researching the process of photo editing by watching youtube tutorials. Then I started to look over the implementation of image processing algorithms.
Is your progress on schedule or behind? If you are behind, what actions will be taken to catch up to the project schedule? ”
Presentation preparation and camera research were unaccounted for in our original Gantt chart, and they took a substantial amount of my time. While I was supposed to finish the initial image editing approach this week, I am still in the research process. However, I am confident that I will be caught up by the end of the project setup phase.
Because our cameras are so expensive compared to our budget, our group wanted to wait for presentation feedback before finalizing our order. This way we would ensure that our camera choice was and other major components were not needed. As a result, our tasks for next week will be delayed a week while our parts ship. During the upcoming week, I will finish the initial image editing design. We also made conservative time estimates for project setup tasks and scheduled a week of project setup slack.
What deliverables do you hope to complete in the next week?
Next week I hope to deliver the codes and notes for the initial image editing approach.