
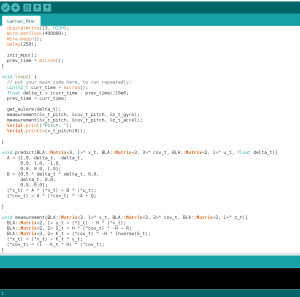
This past week I focused on reformulating the kalman filter. As I stated last week, our original formulation for the kalman filter was entirely wrong and so I spent significant time this week rederiving the dynamics equations for the quadcopter and understanding how to properly incorporate the gyro and accelerometer measurement updates into the state estimate. This led to a very productive week but I need to figure out how to properly tune the process and measurement noise variables in order to ensure that the state estimation does not lag the real variable.

This upcoming week I will focus heavily on tuning the kalman filter. Additionally, now that Bhavik and Gaurav were able to assemble the frame, I will be able to test out my code for controlling the drone motors. This is some boilerplate code I have lying around from a previous project. This should allow us to delve pretty heavily into tuning PID which is the next major step of our project and something that needs to happen quickly so we can get to actual flying testing.