
Overview: This week, I focused on key elements in the design and development of our smart charging table project. The core goal of the project is to create a system where robots underneath the table can automatically locate a smartphone (or other Qi-enabled devices) and initiate charging seamlessly. I contributed by researching potential solutions, designing the system architecture, and preparing the project’s presentation material.
I took the initiative to research possible technical solutions for both the hardware and software layers of the project. Key aspects I worked on include:
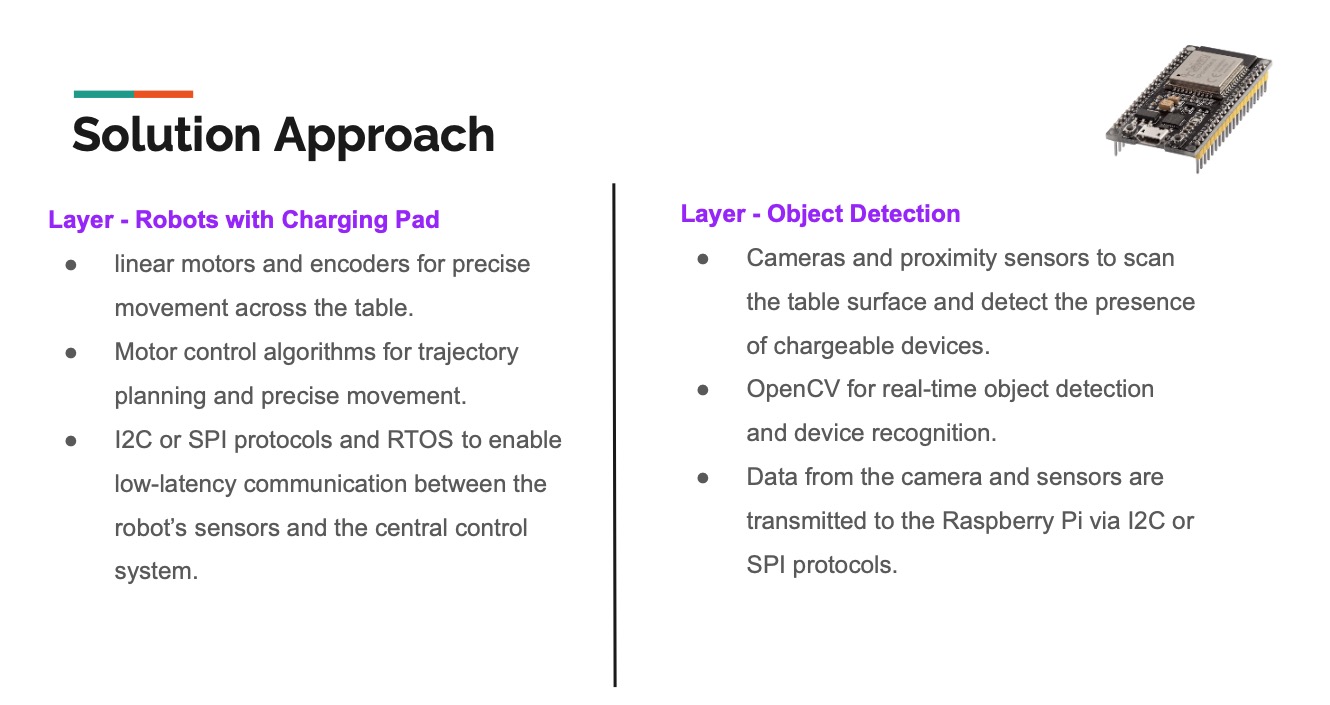
- I devised a system approach where there is a separation between object detection (handled by the upper layer) and charging pad movement (managed by the lower layer). This dual-layer system ensures efficient detection and charging.
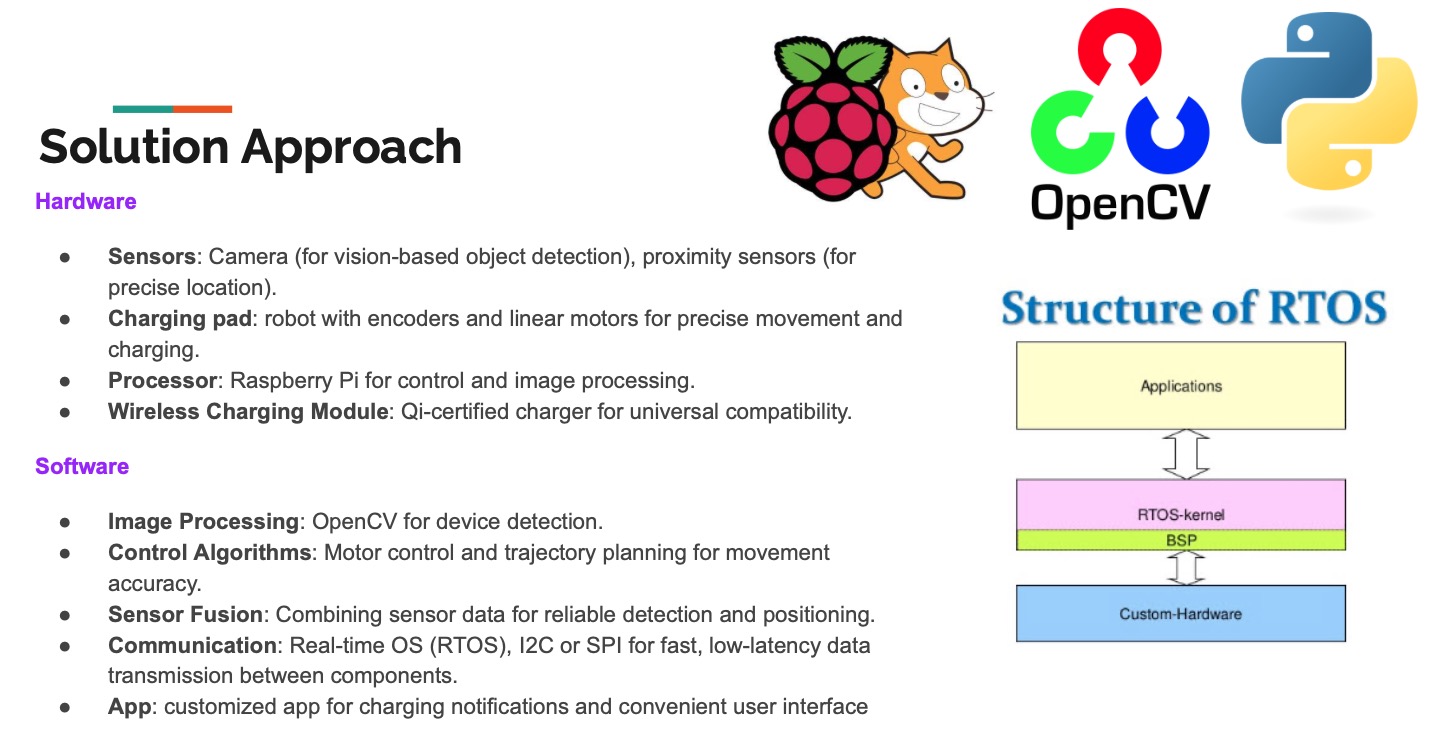
- I proposed integrating cameras and proximity sensors for detecting devices. I identified OpenCV as the tool for real-time object detection and suggested the use of sensor fusion techniques to enhance detection accuracy.
- For precise movement, I researched the use of linear motors and encoders to achieve the required sub-centimeter accuracy in the robot’s movement. I also identified control algorithms that would optimize movement planning and trajectory.
- Based on the system’s needs, I suggested using real-time operating systems (RTOS) with I2C or SPI communication protocols. This would allow fast and reliable data transmission between sensors, motors, and the central processing unit (Raspberry Pi).
- While preparing for the project presentation, I identified the main technical challenges, including:
- Device Detection Accuracy: I emphasized that the system needs to detect devices across a large surface area with a margin of error of less than 1 cm. My proposed solution involves dual-layer detection using both computer vision and proximity sensors to enhance speed and accuracy, targeting detection within 500 milliseconds.
- Positioning and Alignment: I helped define that the charging pad must align with the device’s wireless charging coil within a 2 cm accuracy range in under 10 seconds. The encoders and feedback system on the robot will ensure precise alignment.
- Communication Efficiency: I addressed the importance of high-speed communication between the sensors and the control unit, ensuring low-latency data transmission using I2C or SPI protocols.
- Minimum Viable Product (MVP): As part of the MVP, I along with my other teammates outlined the essential features that need to be completed for the first iteration of the smart charging table:
- A three-layered table system, including a transparent surface, the robot movement platform, and the camera hub for object detection.
- An automated device alignment system using dual sensors to detect and position the charging pad within a 3 cm range of accuracy.
- Integration of a basic Qi-certified wireless charging module providing up to 15W power output.
- A feedback control system to monitor and update system parameters in real-time.
- I created the PowerPoint presentation used to explain the system approach, technical challenges, and proposed solutions. I ensured that the slides clearly outlined the hardware, software, and layered approach that the project will follow.
- I worked closely with the team to review our progress and ensure that we are all aligned on the next steps. I also facilitated discussions to resolve any design issues, particularly regarding motor control and sensor integration. Feedback was incorporated into both the presentation and the technical documentation.
We are currently on our schedule.
Next Steps: For the upcoming week, I plan to focus on the following tasks:
- Begin prototyping the detection system using OpenCV and test proximity sensors with the Raspberry Pi.
- Finalized the component list and start design the system.
- Refine the MVP features based on the system and iterate the design as necessary.