
This week I’ve been focusing mostly on the mechanical design aspect of the project. After discussions with the group, we basically settled on a three-tier table design: the bottom layer is for the camera module, the second layer is a transparent acrylic panel for charging the robot to move around, and the top layer is a transparent tabletop.
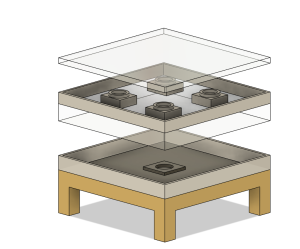
I have our V1.0 CAD model finished. And we are also working on the mechanical design for the moving charging robots. We got out inspiration of the moving charging robot from CMU Zoom Lab’s multi-agent robot and we consider to use ESP-32 as the Central Processor for our robot as its compact size and built-in wireless communication features fits our application.

Next week, I will further polish the CAD design for our desk and starting the detail CAD design for the charging robot with real-world dimensions. Hopefully, we can have a better design image while at the same time starting the component selection process, as the model of motor used by the charging robot could impact a lot on the mechanical design.
As for the presentation slides, I was in charged of division of labor, schedule, and Preliminary Testing & Validation. I have reviewed the advice from the post-presentation feedback and audience reflects that our Gantt chart is hard to view. They also suggest that our task division in the Gantt chart could be more achievable and solid if we can split the task according to the different levels of the tasks. So next week, I will also further refines our Gantt chart and then ask for professors’ and TAs’ guidance.