The most significant risks that could jeopardize the success of the project are difficulties in programming the DWM1001-DEV boards, as well as UWB being less robust than we initially assumed. The DWM1001 development boards use the nRF52832 microcontroller, and programming it with the functionality that we want might be more difficult due to possible lack of support in areas such as maintaining a larger network of devices or accurately calibrating for antenna delays. If these aspects seem to interfere with our project, we can either work on implementing some of the capabilities ourselves or try pivoting to using a different microcontroller with the DWM1001 boards, such as the ATMega328p, which could have more library support. Additionally, UWB could be less robust than initially assumed, providing less accurate readings indoors. The possible contingencies we are thinking of right now are to add more sensor fusion from IMUs, or in the worst case pivoting towards using a different technology altogether.
This week we finished flushing out a design of the system using UWB instead of Wi-Fi, and we were able to create an updated block diagram that more precisely reflects our understanding of the design.
Last week we said that we were going to include a new schedule, and this week we spent some time developing it.
18500 Gantt Chart 2-17
Goals for the next week
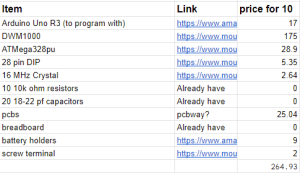
Put in order forms for all the all the components we want.
Run initial testing DWM-1001 MDEK boards. Try to find distance between an anchor and a tag using to way ranging time on arrival (TOA) and make sure that it is accurate.
Continue working on setting up the webapp.
Status Report Prompt: A was written by Ifeanyi, B was written by Jeff, and C was written by Weelie.
Part A: With regards to health, safety and welfare, our project relieves anxiety related to being lost in unknown parts of campus. This anxiety can be especially severe when one is alone, as there would be nobody to ask for directions. And even in the presence of others, finding somebody willing to lead you all the way to a class can be hard, and time consuming, much like the alternative solution of wandering the building until the desired room is found by trial and error. In general, our project greatly aids the mental well-being of students by providing convenient access to anywhere they need to go, as well as saving students from the stress of arriving to events late by saving them time in the room-finding process.
Part B: One way our project could affect social factors is to help students navigate campus better, which could bolster or provide an incentive for students to explore campus. Some students may often feel stressed when they are tasked with going to a new building, and this device may alleviate some of the negative feelings those students may have. Our mapping software could help students save time looking for classrooms or offices, making their schedules more efficient.
Our device could lead to privacy concerns for students, as it would consist of placing a tracking device on every student. A bad actor would be able to see the locations of students using the device. It would be important to avoid this from occurring by placing safeguards so that the privacy rights of students are respected. The device could also create dependency of students on the navigational technologies, hindering their abilities to navigate among rooms on campus without it.
Part C: We use 12 different UWB devices for anchors, IMU and esp32 for the tag. The tag itself is not expensive, which may only take 15 dollars. However, combining with UWB devices, since each floor probably needs 12 UWB devices, for a whole building, this could be pretty expensive. For a 3 floor building, the total cost could be over 1,000 dollars. For individual users, the tag itself is easy to buy and for distribution. But for all of the anchors, it’s better for a company or the owner of the building to buy the whole system, and provide services for individual users. Since companies can also charge users for buying their services, depending on different companies, this could save their cost. For individual users, their cost will increase if they need to buy the services from companies, but it should not be as expensive as purchasing a single anchor($33).