This week:
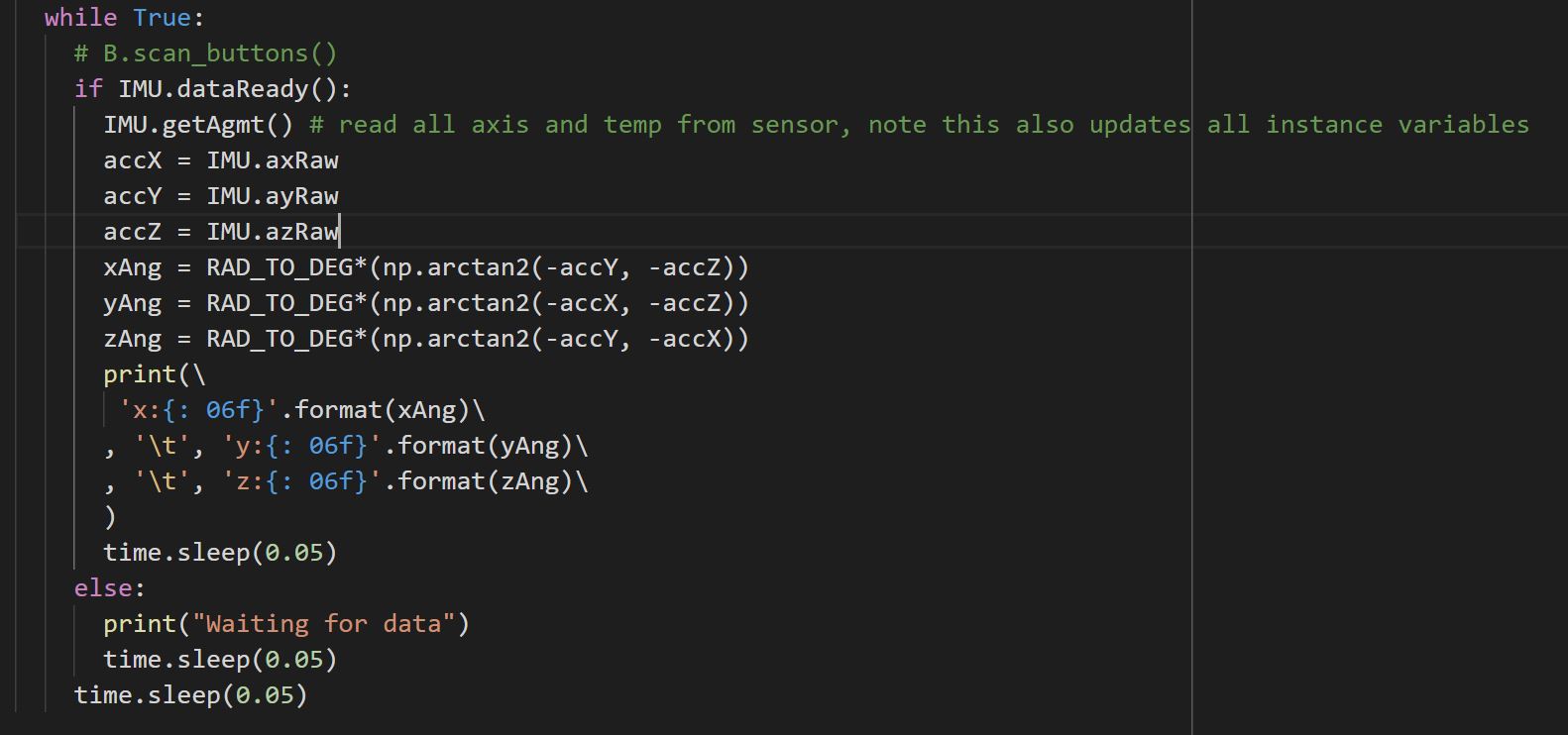
I keep working on the code for calculating the current angle of X, Y, Z axis. Currently we already have code to calculate the angle output from the accelerometer. However, this works best only if the gyroscope is not shaking too much. The current code aims to allow my partners to use the data for the demo session if possible.
The accelerometer code looks like this:
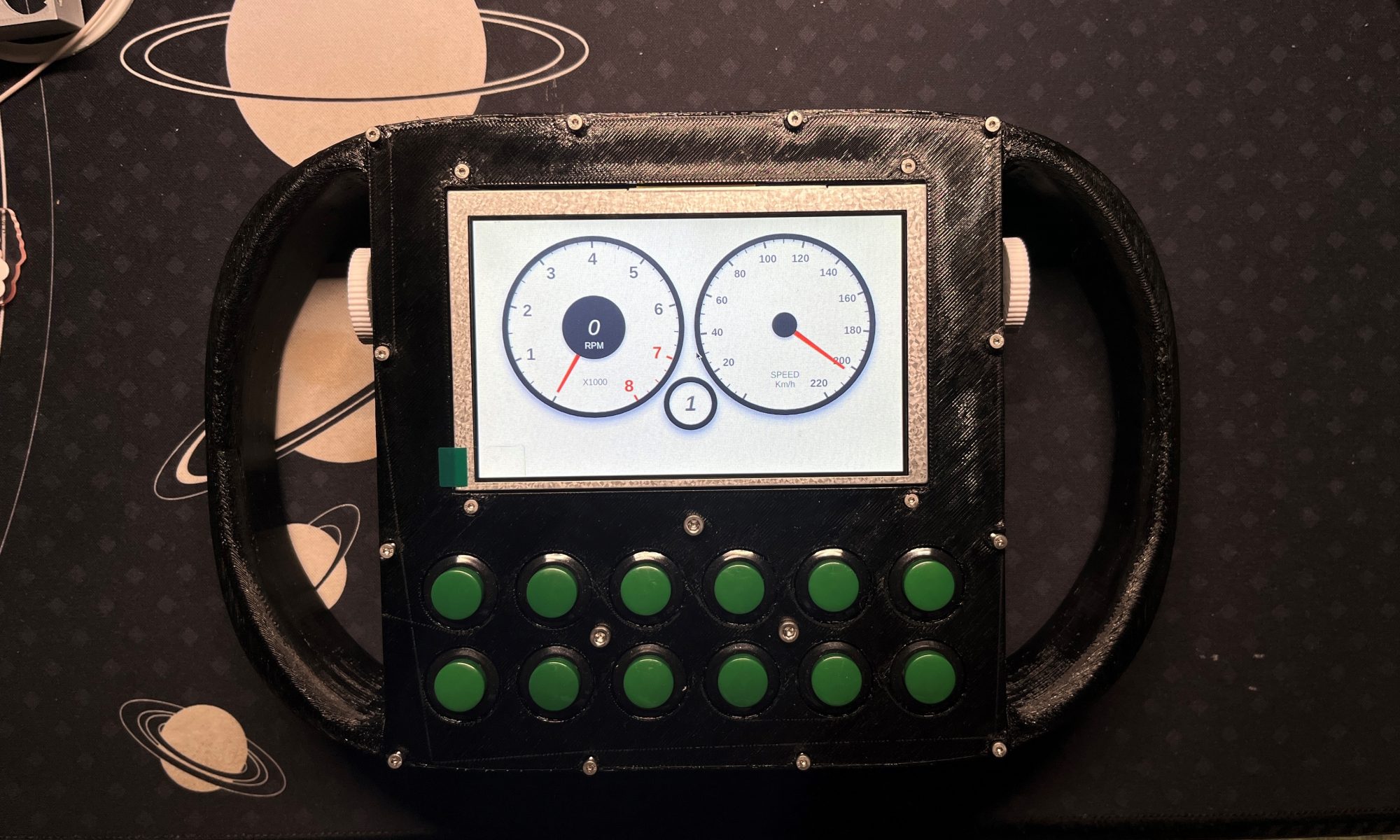
When the gyro is stable, it can correctly generate angle readings like the following rotation on z axis:
[Wordpress starts blocking me from uploading images now, I tried to remove eariler files, reduce resolution but both methods doesn’t work, I can show it during the demo session next week]
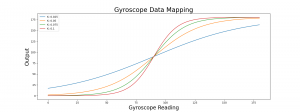
However, as I stated above, the algorithm is not very resistant to shaking. We need gyroscope data to help overcome this issue. The Madgwick paper provides a solution to combine two types of readings together. Figure 3 of the Madgwick paper provides a good explanation to its method (I cannot upload it here due to the wordpress issue). It’s clear that the method is quite complex, and I do need more time to look into this and think about how to implement the method. Luckily the paper has code appended to it, but I think I really need to fully understand it first before using it.
Here is the end of the report for this Saturday, I wish I can have more findings this weekend. I still have some questions about the paper and I will ask faculties about them if I cannot figure it out by the weekend.