
This week, our main goal was to get a working demo ready for the coming week. My job for this week was constructing the mounting for all the devices on the iRobot. We decided we needed 2 levels of mounting, since the LIDAR would need its own level since it operates in a 360 degree space. Thus, I set the LIDAR on the very top and then set the NVIDIA Jetson Xavier and the webcam on the 2nd level. Due to delays in ordering standoffs and the battery pack, we have a very barebones structure of the mounting. Here’s a picture:
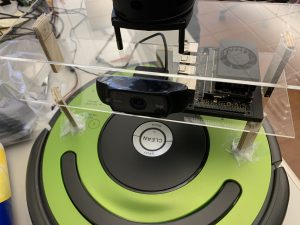
Once the standoffs arrive, we will modify the laser-printed acrylic to include screw holes so the mounting will be sturdy and legitimate. This week, I plan to get path-planning working with CV and object recognition.