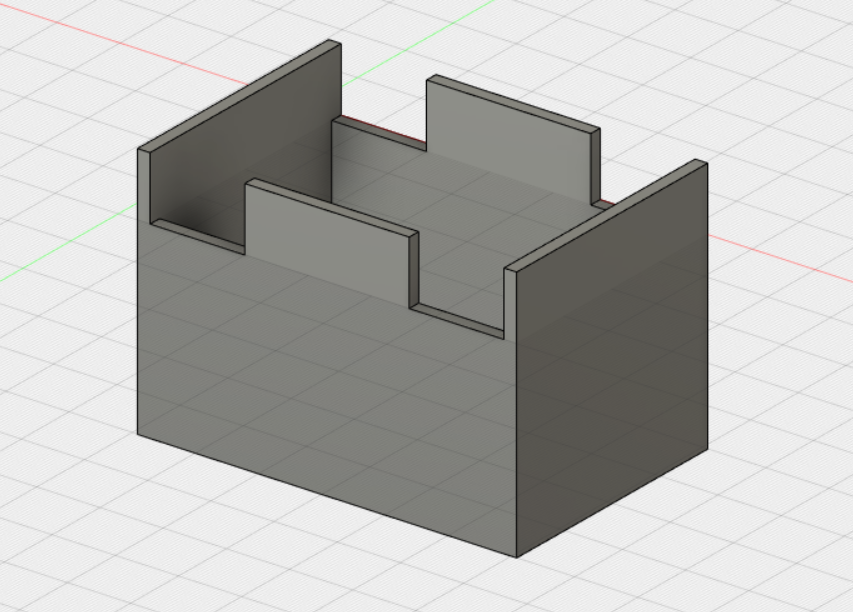
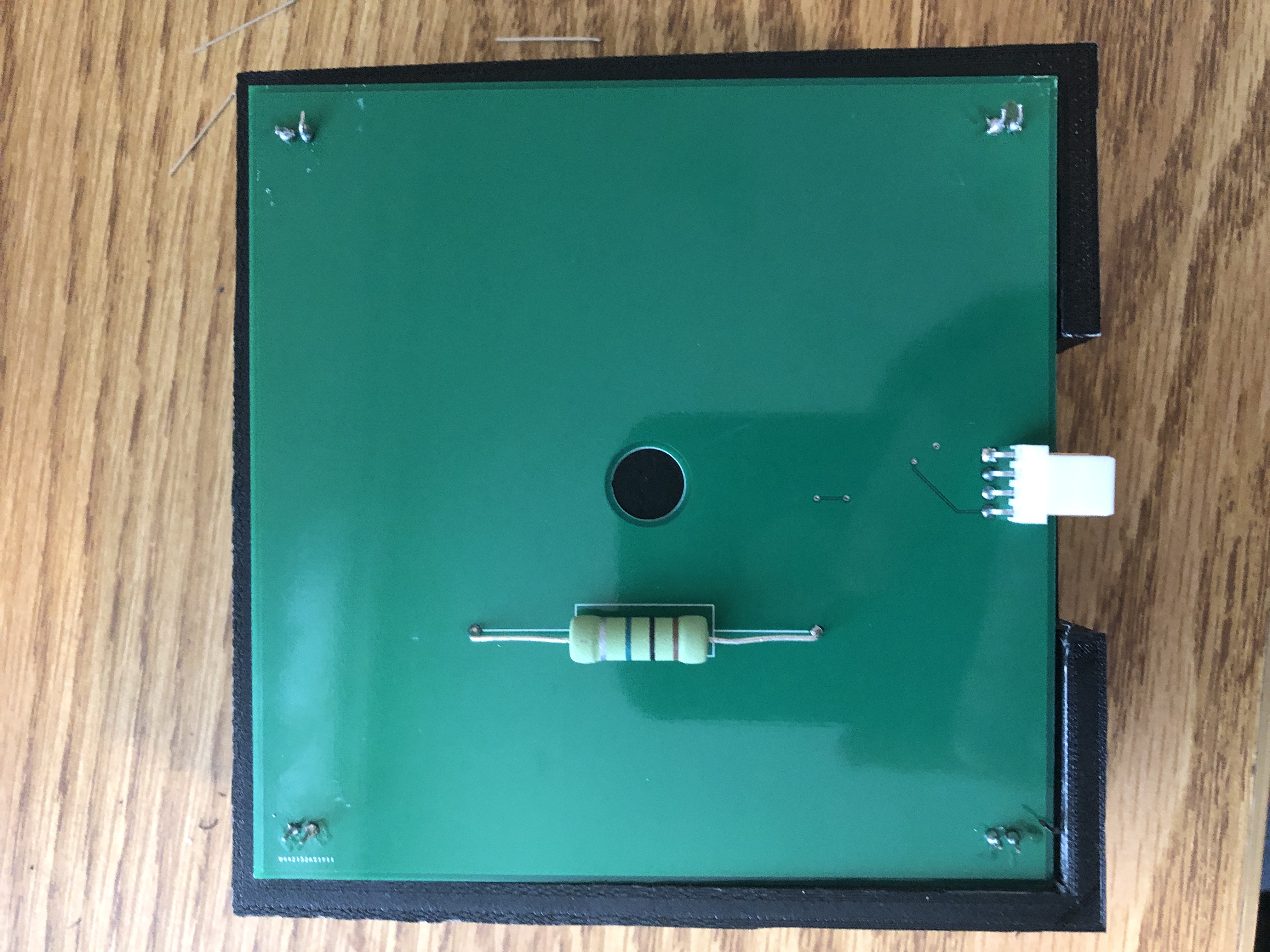
The majority of this week was spent creating the 4 final drum modules, which included soldering each of the PCBs and 3D printing the drum housings. As of right now, all of the PCBs are soldered and (mostly) functional and I’ve printed 3 of the 4 total drums (the dremel printers in TechSpark were occupied most of this week so I’m printing the last one this weekend).
https://drive.google.com/file/d/1T9HWiaXTrl7rABxwUqzvM6yQnoAtga9A/view?usp=sharing
https://drive.google.com/file/d/1MaeZnkecdY8ms-ItmZ9qRBaB1ymTffSX/view?usp=sharing
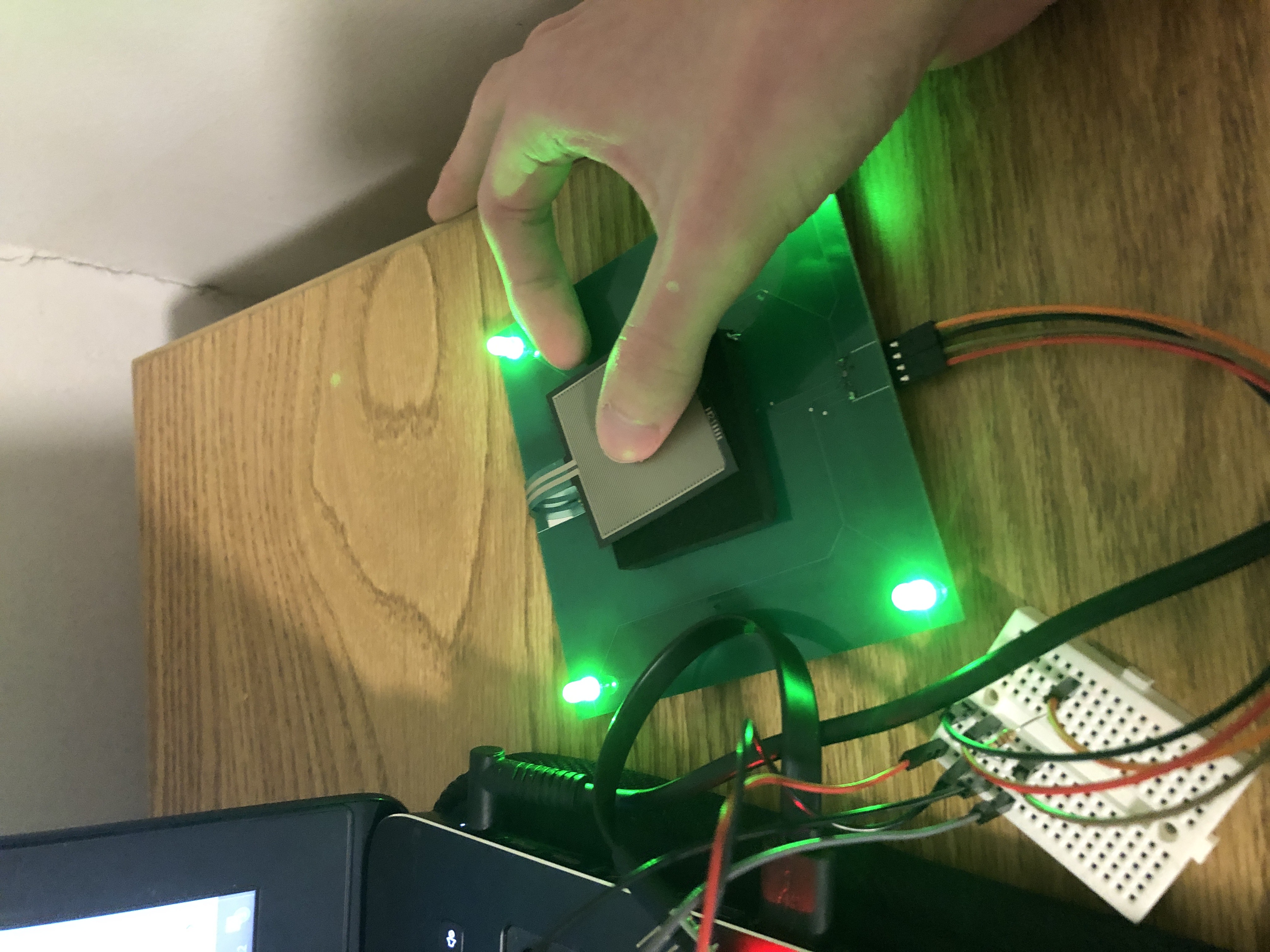
Currently, 2 of the 4 PCBs I’ve soldered are operating perfectly, with all 4 LEDs receiving feedback from the ESP32.
https://drive.google.com/file/d/1JVWyY8zhrED-C6ImZAhHwnd7PPoJRTvZ/view?usp=sharing
https://drive.google.com/file/d/1JCIqvQrxr8q2foaXEXLrCToc0U5jX7bv/view?usp=sharing
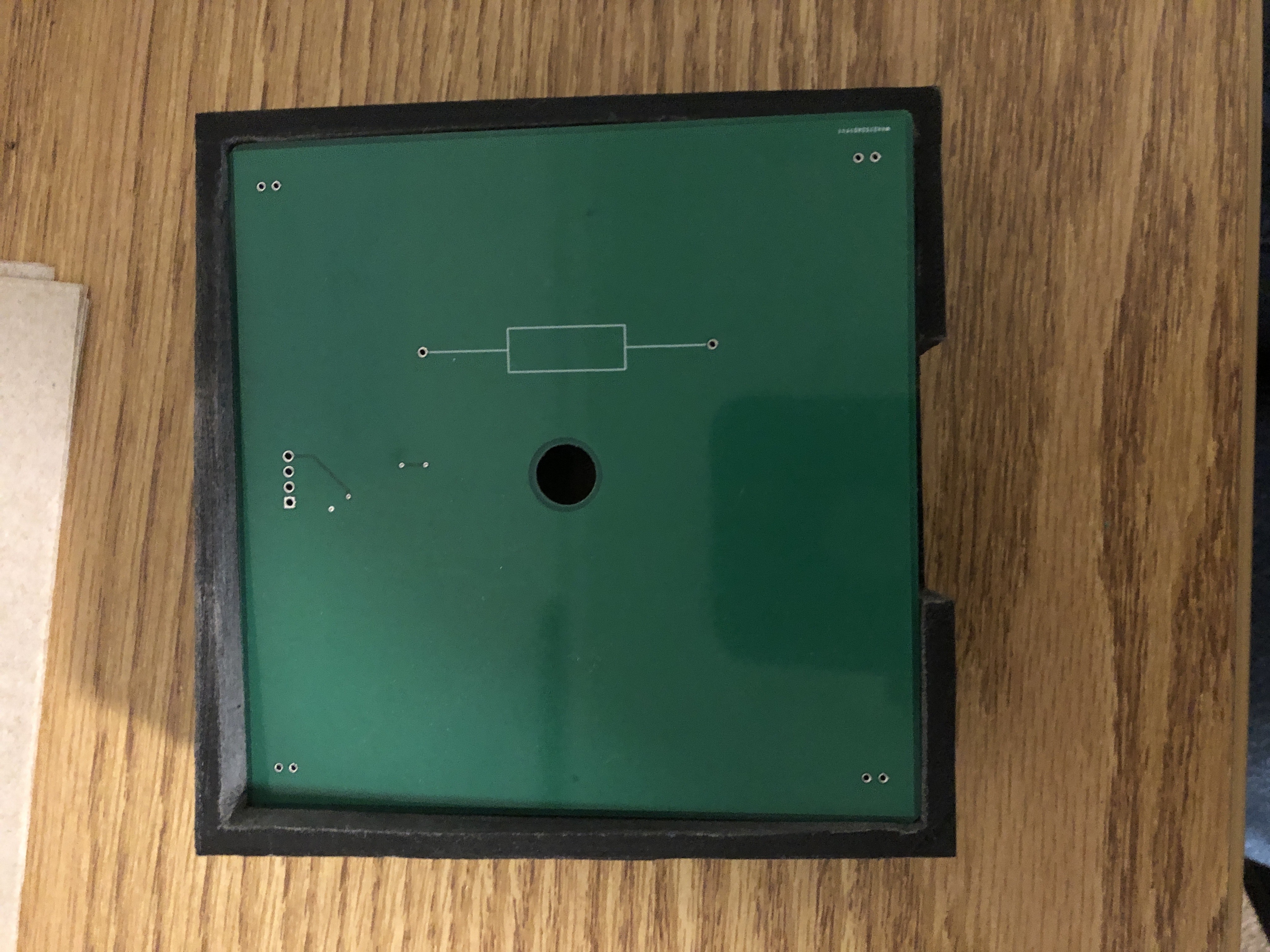
However, the two other PCBs have minor soldering issues with some of their LEDs, so I haven’t trimmed their leads and placed them into drums yet, as I want to resolder their connections properly.
https://drive.google.com/file/d/1CVYEODAB1FGnWKjktggWexWcM0r705bB/view?usp=sharing
https://drive.google.com/file/d/1Js0cr5h1dcjLEnHlIN9yyXimBuaWOt4X/view?usp=sharing
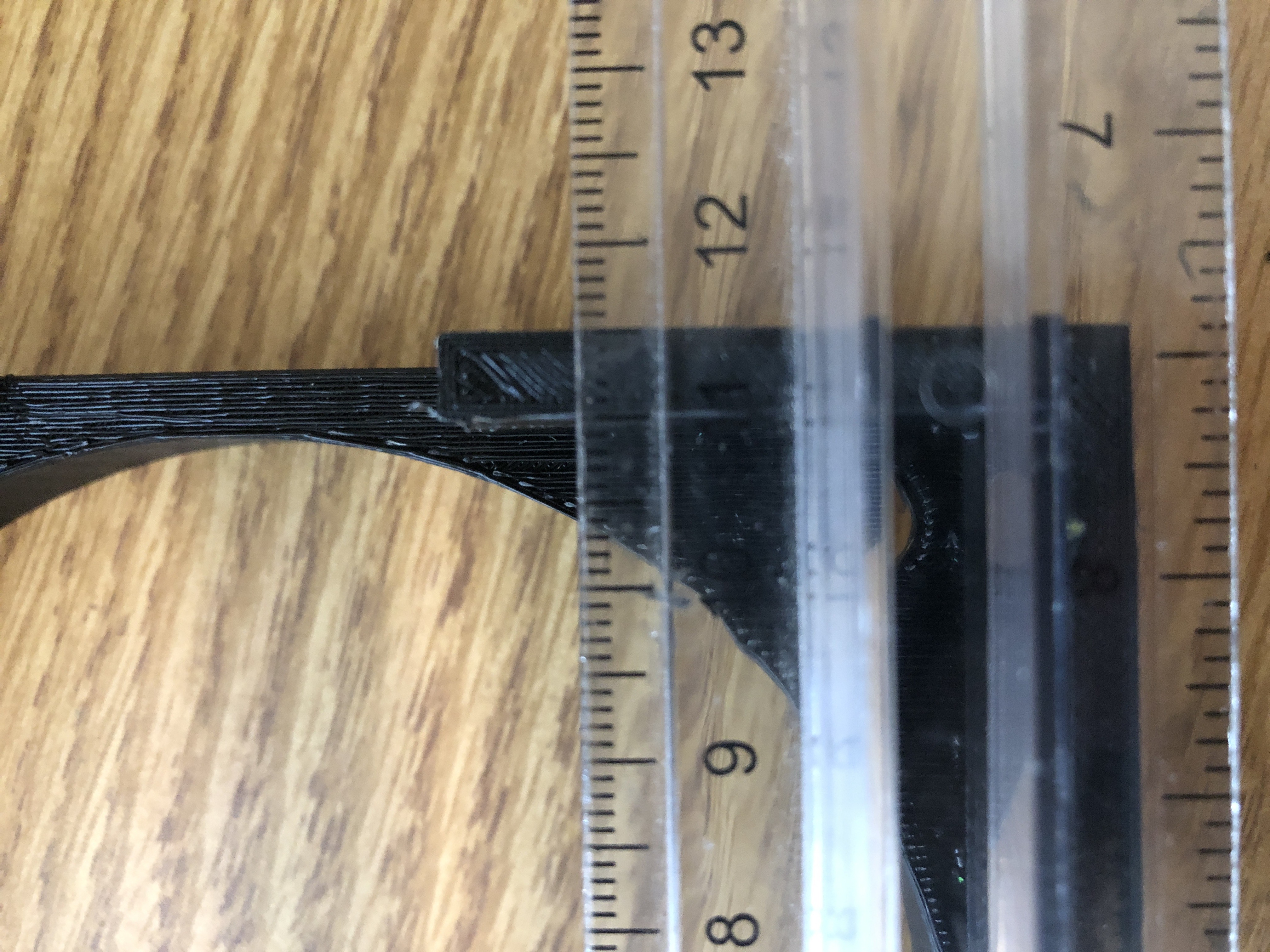
The issue which caused this is regarding the small solder beads depicted below, as all 4 LEDs on the PCBs worked immediately after soldering, but upon bringing them back to my dorm I realized that the LED leads were jostled in my backpack, which caused the hardened solder to break itself off from the PCB, ultimately disconnecting it from the circuit. To fix this, all I need to do is reheat the solder and form a better (more shock resistant) connection.
https://drive.google.com/file/d/1UG_pr4wPE5gjd6lG7UZG1uREZa2nyTdW/view?usp=sharing
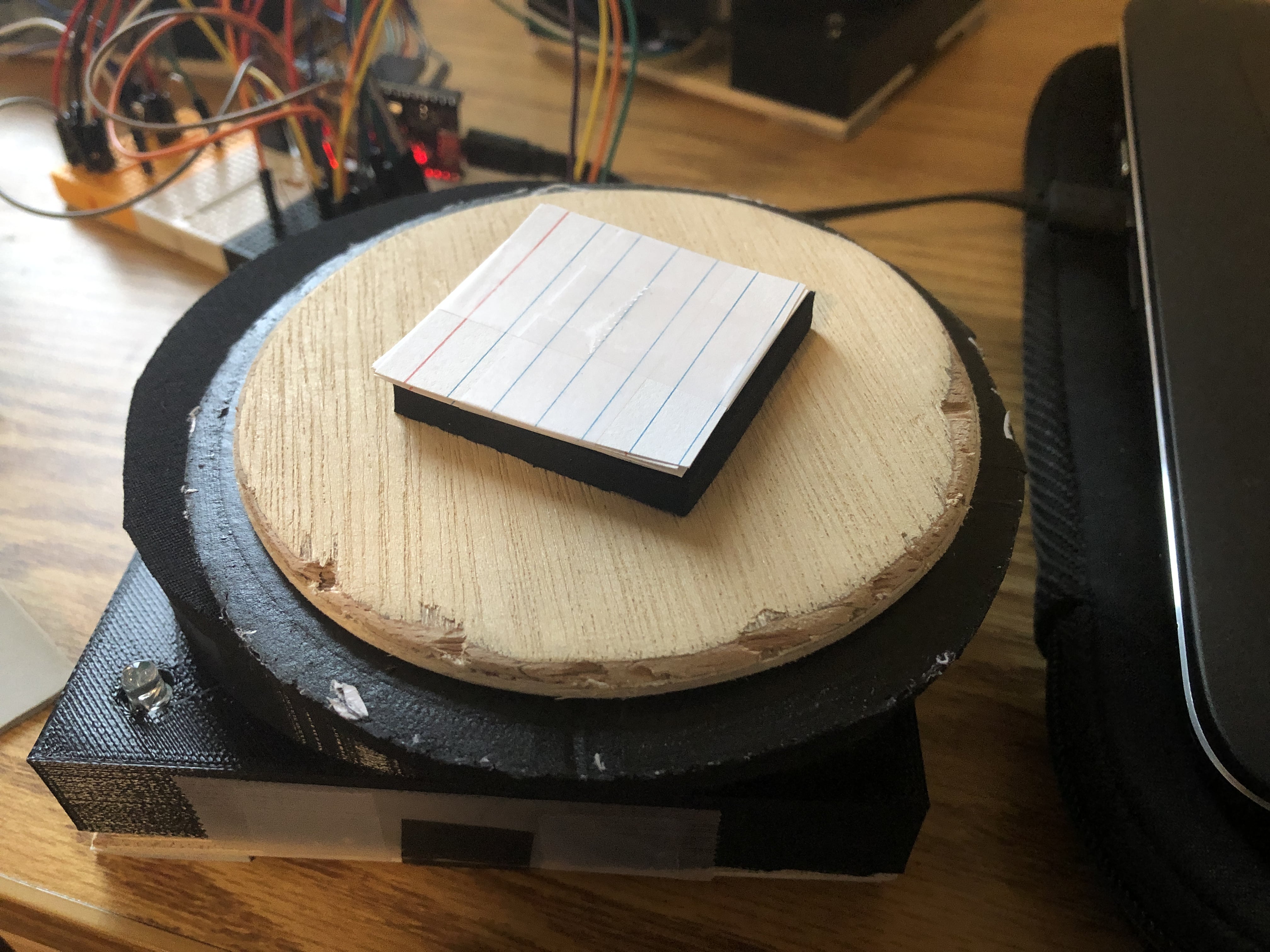
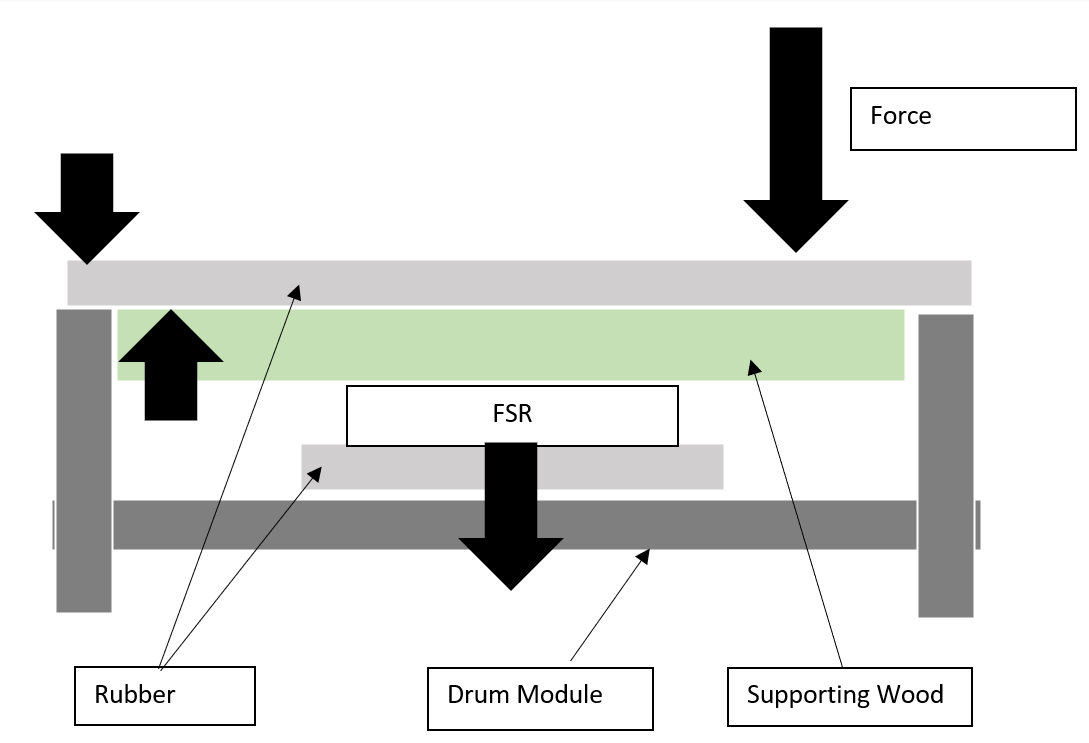
Lastly, I also acquired some wooden bases and supports for the drum modules this week. These bases will be fixed to the bottom of the PCB and to the drum’s base, which will provide support and isolate users from the drum internals. Additionally, I opted to use wood for this purpose as it was cheaper than 3D printing these parts and by using wood the bases will have more friction with whatever surface they are placed on, which should help prevent them from sliding around as much.
https://drive.google.com/file/d/1WeOysxl3Cy4t8Gs_CMU4My-Iigs1XabT/view?usp=sharing
https://drive.google.com/file/d/16U3gzAclyG5kQM6xwUeATo90310gCExV/view?usp=sharing
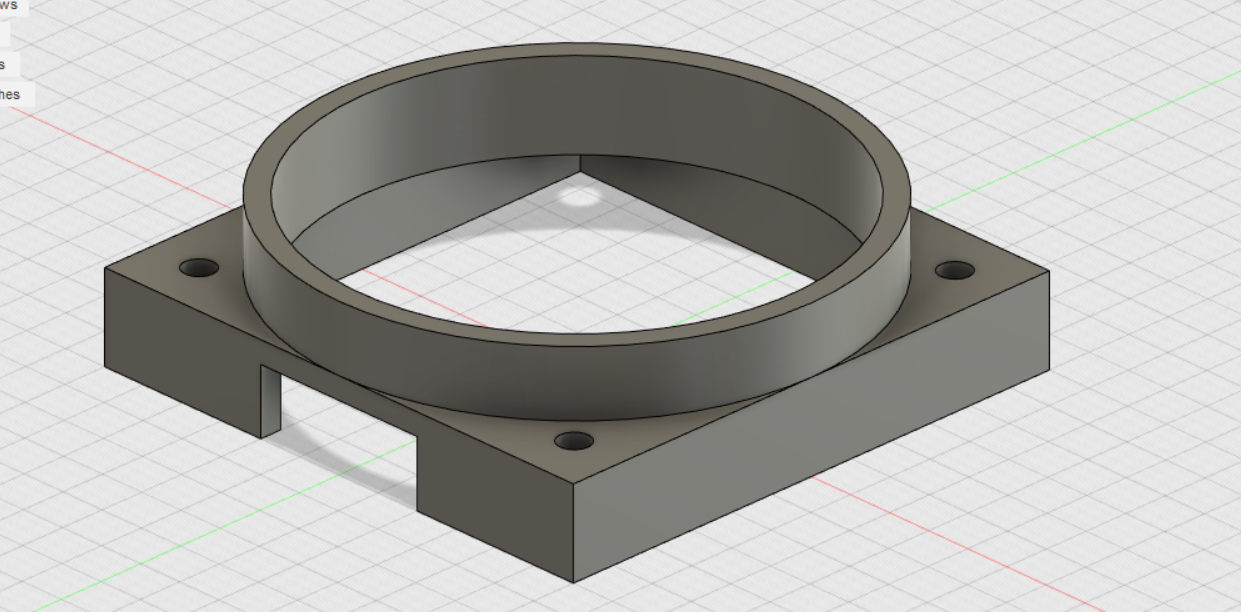
Regarding where I am in regards to our schedule, I think I’ve caught back up on pace this week/weekend, as once I’ve finished printing the last drum and resoldering those PCBs, the drums themselves will be in their finished state (barring some aesthetic improvements possibly) which will allow me to perform some needed testing this week. I do also need make a housing for the ESP32, but that will be purely to isolate it from the user rather than having a major functional purpose, so all I really need to do there is fix the ESP32 in a small box with holes for it’s wires, which shouldn’t take much time.