For this week, our week focuses on the algorithm of the depth camera and the assembly of the belt. We will attach the depth camera to the belt and test the whole system on Sunday.
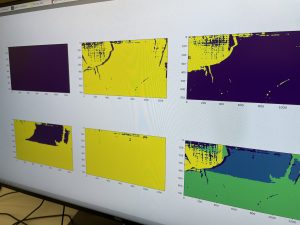
Below is a showcase of our work on the depth camera. We successfully separated the depth information into 4 threat levels (lv. 0 to 3). The frame on the bottom right is the processed frame, in which the yellow area (a chair in the vicinity) is correctly identified as a level 3 threat. We will filter out the ground (green part) on Sunday before testing.
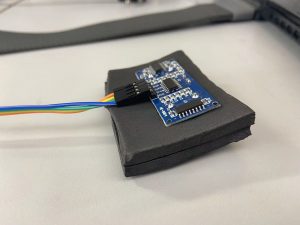
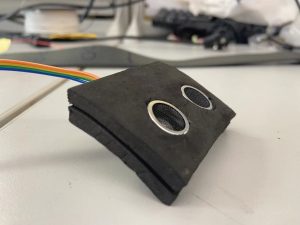
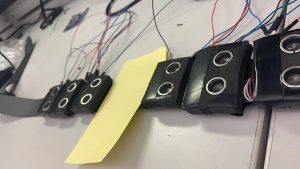
Below are showcases of our sponge-protected ultrasonic sensors and the partly assembled belt. We expect the sponge to serve as protection as well as cushioning that prevents the vibration of one vibrator to pass through the entire belt. The center of the belt, now covered with a piece of yellow paper, is where the depth camera will be.