
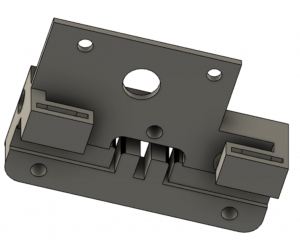
This week I worked on remodeling the y front attachment (pictured below), assembling the gripper, and designing the z movement mechanism. I was able to do some testing with the gripper attached to the gantry and the elevator mechanism for the z motion works.
I also designed and laser cut the camera and raspberry pi mount.
This week I am going to figure out how to make the gripper arms more suitable for picking up pieces without slipping. I am also going to work on refining the website and look into Django channels to figure out how to send and receive information to and from the raspberry pi.