This week, because our project is essentially finished and fully integrated/working, I worked on our final video with the rest of my team. Specifically, I recorded videos of us demoing our entire system as well as various clips of the mechanism moving and the sensor array working. I also have begun my voice-over recordings which will be overlaid with our final edited video as I am responsible for speaking in the final video. Here is a folder with all the clips I gathered with my team this week: Final Demo Videos.
I am on track as we are wrapping up the semester and our project is fully integrated and working.
In the next week, I plan on finishing up my voice recordings for our final video so it can be submitted by Monday night. I also will be working on our final report so that we can submit that by the deadline as well.
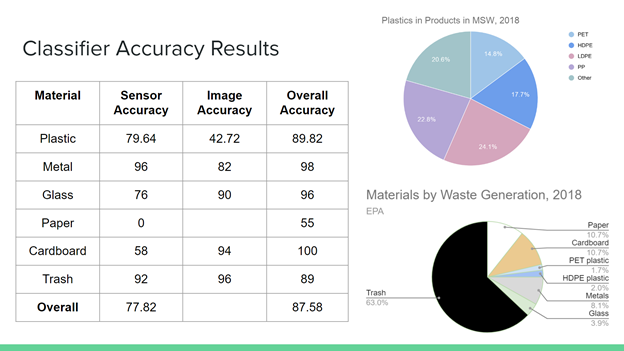
Moving into the final stretch of the semester, the most significant risk to our project is the accuracy of the image classifier and how that may affect the overall classifier. We were able to get pretty high confidence levels for most of our materials. However, our image classifier does not seem to be able to classify paper as recyclable with any confidence. To mitigate this risk, we have decided to use different weights for our separate accuracy rates per material based on how frequently certain items are thrown away to calculate our overall classifier accuracy (more specifically, we’re weighting each material by % of MSW generated, which is the proportion of each material out of all waste produced). This will allow our overall system accuracy to be a more accurate reflection of what it would be in the real world.
The most significant change we made this week was implementing the weighting system that I just described for each material’s accuracy weight. We feel that doing this will provide us with a more accurate overall accuracy rate for the entire system as if it was in full operation on a college campus, compared to if each category was weighted equally. One change that we may make to the design in the next week is retraining our ResNet-101 model to allow HDPE plastics to be considered as recyclable for the image classifier (the pictures of the HDPE plastics are currently in the trash training and validation folders). Retraining is necessary in order to improve our overall accuracy for plastics.
We are currently on track. We are preparing for our Final Presentation next week and are still mainly focused on increasing the overall accuracy of the system, but we do feel confident with our most recent accuracy data which can be found here.
Current accuracies as of 5/1 (will redo paper trials on 5/2 for the image classifier)
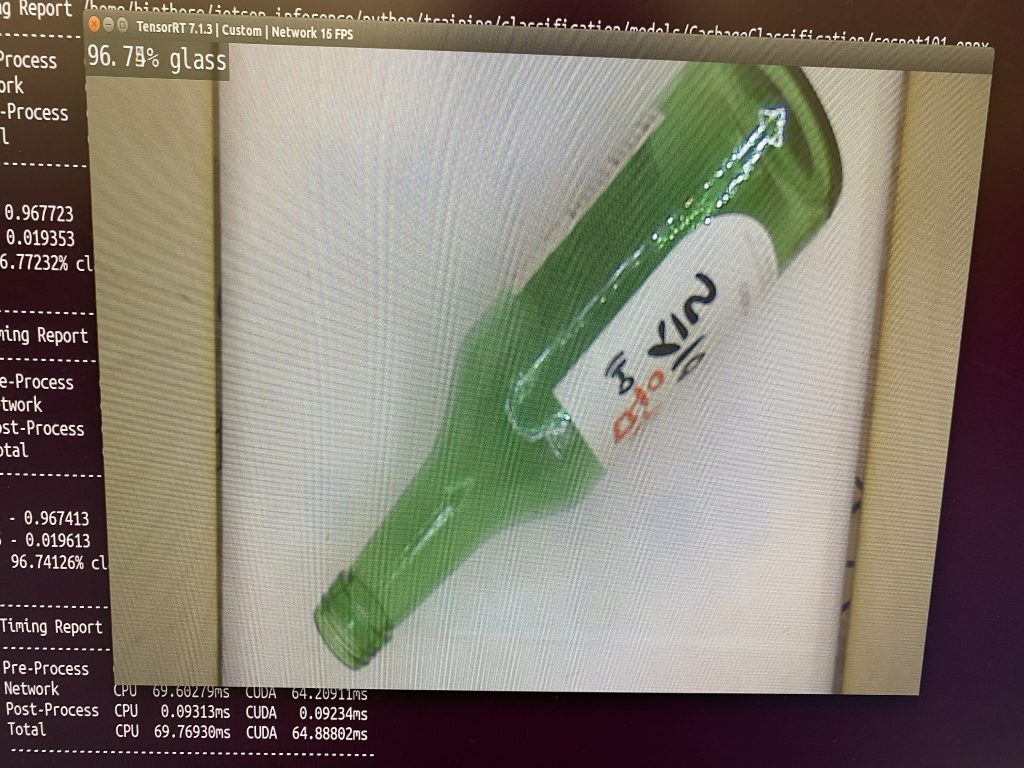
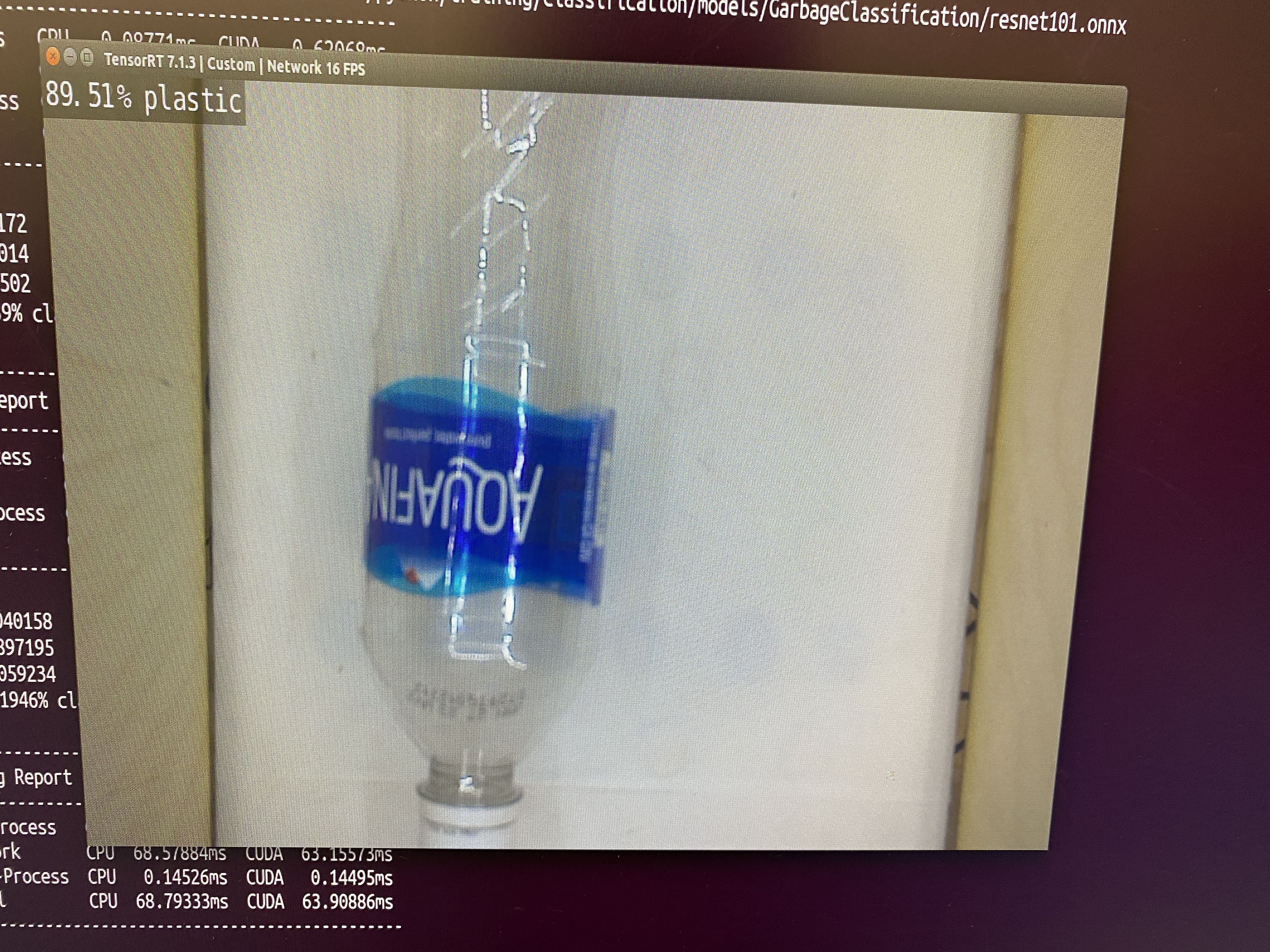
Here are some images of the image classifier working with high confidence levels.
Image Classifier on Glass (96.7% confident)Image Classifier on Plastic (89.5% confident)
This week, I collected and recorded a lot of data on the accuracy of our recycling system. Specifically, I collected data on the accuracy of the sensor classifier, the image classifier, and the overall classifier. I conducted 100 trials per material for our overall classifier for various different items of the same material classification. So, 100 trials were conducted for each material category which includes PET plastic, HDPE plastic, metal, glass, paper, cardboard, and trash. In addition, for the individual testing of the sensor and image classifiers, I conducted 50 trials per material category for both classifiers separately. Here I have attached the full data sheet with all of the recorded accuracy numbers: Data. I also recorded the accuracy of our ResNet model per epoch during its training and graphed the results here.
My progress is on track.
In the next week, I hope to continue to improve our overall accuracy with the rest of my team and help Jessica prepare for our Final Presentation next week. I also plan to work with my team to start making videos of our functioning system for our video demo coming up.
This week, I captured a lot of pictures of different types of trash and recyclables with our camera mounted in our bin. For each individual item, I took many pictures from many different angles and orientations. I estimate that I probably captured 15-20 pictures per item. These pictures will hopefully help increase the accuracy of our image classifier by providing pictures that directly represent the environment the camera will be seeing when items are thrown into the bin. Our accuracy for the image classifier was pretty low given the existing data set we were using, so adding these pictures in our environment will hopefully help quite a bit. Here is a folder of all the images our image classifier will be using, which includes the pre-existing images and the ones I took: Images.
My progress is on schedule as every system has been integrated.
In the next week, I hope to create a data sheet for my team to record accuracy data of our subsystems and entire system. I plan to work with my team this week to begin collecting data on how accurate our system is by running the system a bunch of times on different items and recording whether the outcome was successful or not.
The most significant risks moving forward involve the integration of all of our subsystems. We have the mechanism working as the motor moves the sliding mechanism. Our sensor array is able to detect/distinguish certain materials. However, integrating all of the mechanism, sensor platform, and image classifier could potentially be challenging and poses our biggest risk. We have already begun the integration process and will continue to work together regularly to make sure that our system is operating as intended. We have individually tested each subsystem and continue these tests to ensure a smooth integration process for the interim demo and final demo.
The most significant change that was made in the last week was the re-sizing of our exterior shell. We did not account for the necessary space that the camera needs to see the full sensor platform in our original designs. So, we rebuilt the box making it slightly wider, deeper, and taller to ensure that all future adjustments would fit into our exterior. With these updates, we will be using our original sliding box which is 10in x 10in. These adjustments also keep our original goals on track. This size change also made integrating the mechanism much easier due to the extra space. It also allows us easier access to manually adjusting the mechanism and sensor platform should certain changes need to be made during testing and the demos.
We are on track with our progress and are excited to show our progress in next week’s interim demo. We will continue to meet regularly to conducts our system integration and tests. Here is our updated schedule as well.
This week I finished building the entire exterior shell of our project. I had to make some adjustments to the size of the box and thus had to rebuild portions of the bin. These adjustments were made to accommodate the necessary height needed for our camera to see the entire sensor platform and for our mechanism to properly fit with enough space. Part of completing the exterior involved cutting out a 10×10 inch hole in the top and attaching a lid to hinges for the user to open and close the bin. I mounted a contact switch that closes when the lid is shut which will be used to communicate with our Jetson to begin classification. I also mounted the sliding mechanism to the box and began testing it with Jessica. Our initial tests showed we were able to get a “round-trip” speed of roughly 1.4 seconds. We hope to improve on this as much we can. I also attached the sliding box to the sliding mechanism, which will allow for the items of waste to be pushed into the correct bin. For ease of working with and adjusting our sensors and mechanism, I have not attached the side walls to the bin yet and probably will not until the final demo.
My progress is on track as all the necessary components (mechanism, sliding box, etc.) have been attached to the exterior shell. The box is finished and I will continue to make small adjustments as needed.
In the next week, I plan to work with my group on creating a presentation for our interim demo. I will also be helping my group integrate and adjust the sensors to the exterior, and will do more tests on the mechanism speed.
This week I spent the majority of my time working on building the exterior shell for our project. I ordered and picked up wood from Home Depot and had the wood cut to the specific sizes needed to build the exterior. I spent a few days this week in the Techspark wood shop putting together the pieces of our exterior. I also used the laser cutter to cut out smaller pieces of wood needed for the box. I adjusted some of the designs for the mechanism as well because Jessica and I found out that we will need a little more room within the box to be able to properly house our mechanism. I also used Jessica’s Solidworks models of 2 mechanism components and had those 3D printed to be able to fit our bigger gear. Putting together the box has been a bit more challenging than expected because I want to be sure that we are able to put our sensor platform in the box and wire everything without too much difficulty.
I am mostly on track as long as I am able to finish putting the entire exterior together this week and integrate the sensor platform into the shell.
In the next week, I will be finishing up the exterior and making adjustments as needed so that our box can properly fit our mechanism as intended. I will be working with Jessica and Lauren to integrate the entire system as well.
This week I helped my team test the current and voltage outputs of our inductive and capacitance sensors wired together to ensure that our Jetson’s GPIO pins can handle the amount of sensors we are planning to wire together. I ordered some more items for our project as well, such as the proper gear size for our sliding mechanism, a flex cable for our camera, and individual trash bins which will be placed inside our exterior shell. I drew some schematics for our exterior shell so that I can figure out the exact dimensions of our product and so that I know how much wood to purchase to build it. I also made a CAD model of our sensor platform which has various holes cutout to fit the size of our sensors.
My progress is a little behind as I haven’t physically started building the exterior structure of our product, but I have the designs in place and I will be going over them with my team so that I can order the wood and start building the shell.
In the next week, I plan to help laser cut the sensor platform using my CAD model, purchase the wood to build the exterior shell, and start assembling the exterior shell.
This week I spent a lot of time preparing for our Design Review Presentation, which I gave on Wednesday. I also met with Jessica in the middle of the week to hash out any of our concerns on the design for the sliding mechanism. We discussed when certain parts of the mechanism would need to be purchased and then assembled as well. I am currently drawing/designing how our box will be mounted on the sliders, and I made a more detailed diagram of our sensor array with specific sensor sizes and spacing. I also met with all my team members and tested our sensors for around 3 hours on Saturday. I helped solder the ends of the inductive sensor wires to pieces of wire so that they would fit in our breadboard. I also helped with the wiring and connecting of our load sensor which my team hopes to have working this upcoming week.
Everything is on track for me except that I haven’t ordered the mechanism parts yet. Jessica and I narrowed down which parts we need to order, and decided that we don’t need to order them quite yet because we are not in a huge hurry to assemble the slider. I do hope to order the mechanism parts though in the next week or so.
In the next week, I plan to complete my designated sections for our Design Review Report and also plan to finalize my drawing of how the box will be mounted on the sliding rails. I also plan to order the rest of our sensors and begin attaching them to the platform with my team.