
This week I spent on getting down the main mechanics for the car completed. This included a lot of testing of the power systems and the motor response. One thing I found was that our original power delivery system with a 9v battery would not be enough to drive the 4 motors. This lead me to research some solutions that could help to alleviate these issues. Namely, we had to address the efficiency of the motor shields as well as the need for higher battery capacity.
The L298N Drivers for the motors draw up to 2A of current at max capacity with a voltage drop of about 3.6v. This meant that the driver was at about 50~60% efficient. For this issue I decided to move to a new solution using the TB6612FNG based Adafruit motor controller. This MOSFET based design was much more efficient with around 90~95% efficiency. This means that the motors get much higher voltages overall and also alleviates some of the power draw issues.
I also looked into new battery solutions for the vehicle. Both the motors and the compute system were too power hungry for our original specifications. For this task we needed a solution that would provide high capacity, high discharge rate and relatively low weight and volume. This lead us to using choosing 2s 7.4v LiPo batteries with 2200mAh capacity. With this we are able to provide sufficiency voltage to the motors as well as the Jetson Nano with a single battery. Notably as the Jetson requires 5v, we also needed to get a universal battery eliminator circuit (UBEC) to step down to 5v. This solution is yet to be tested, but we are confident that it should suffice for the project based on our research.
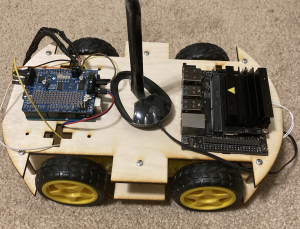
Lastly I was able to build ‘development’ vehicle to allow us to begin to test the track parameters and any other things that may require a mock vehicle such as data for object detection. The vehicle is able to move with all 4 motor but the Jetson-to-Arduino command system is still in development. Below is a quick look at what the vehicle looks like:
For next week I need to finish developing the control system to work with the Jetson. Once this is done and I have tested the power delivery, we should be good to go with making the final vehicles with acrylic.