This week, we were able to fix most of our problems. The system is now able to detect all chess moves and is ready to be demonstrated. One awkward problem we have is that the chessboard is flipped visually, but all the pieces actually move like they do. Another problem that we mentioned in Slack is that the Raspberry Pi cannot handle the workload of pygame, as shown in our pictures, so we think we cannot use it for our final demo.
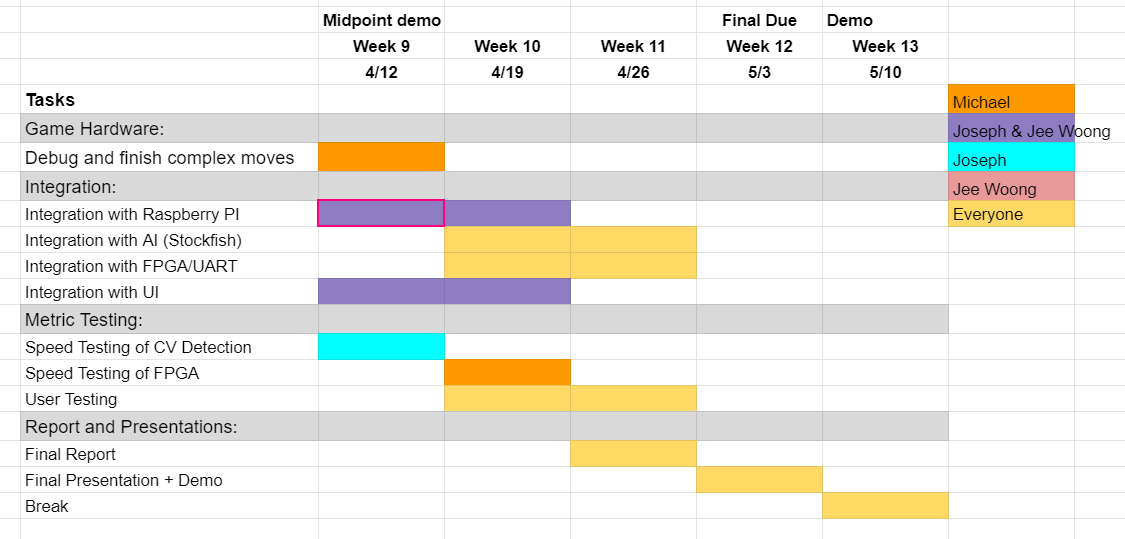
We are on schedule with the Gantt chart. We were supposed to finish the integration of UI with the CV this week, and we were able to do it.
Next week, we are going to finish integrating with the FPGA and hopefully only worry about presenting our product.
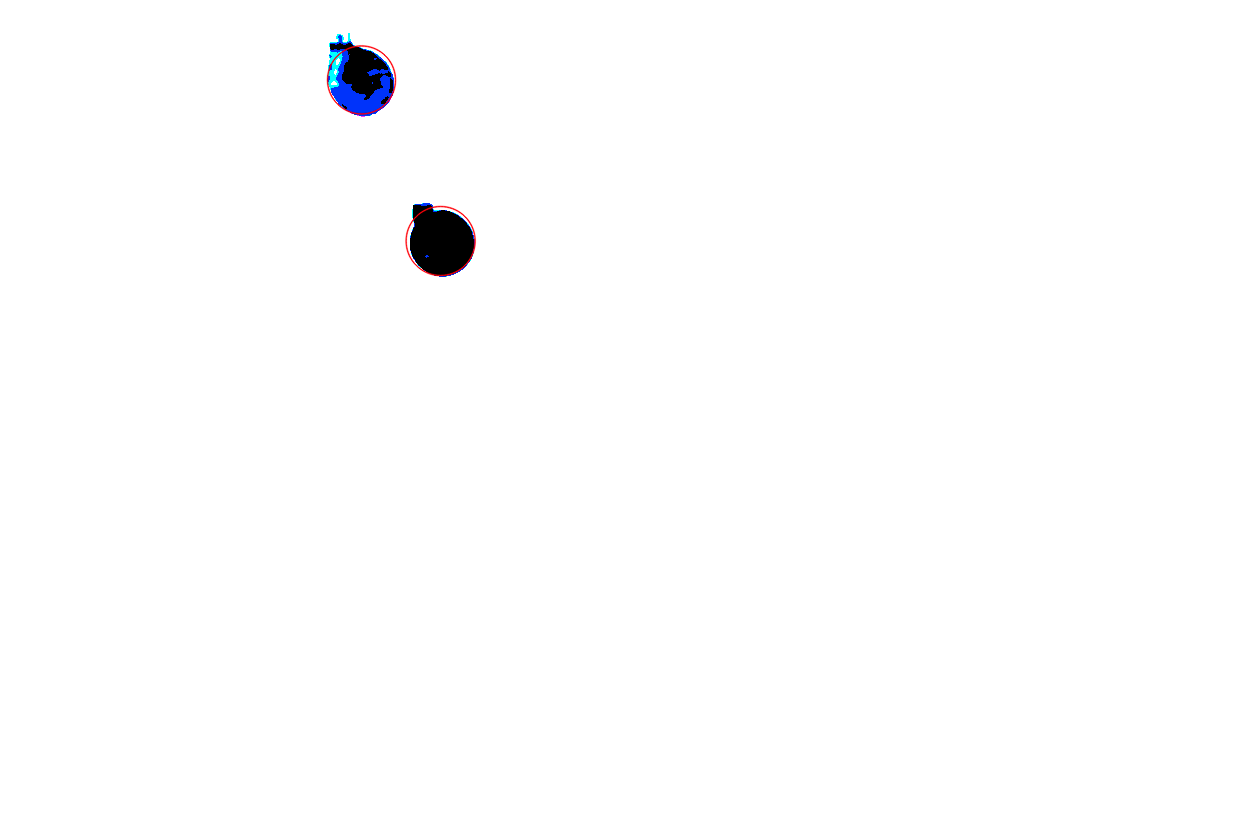
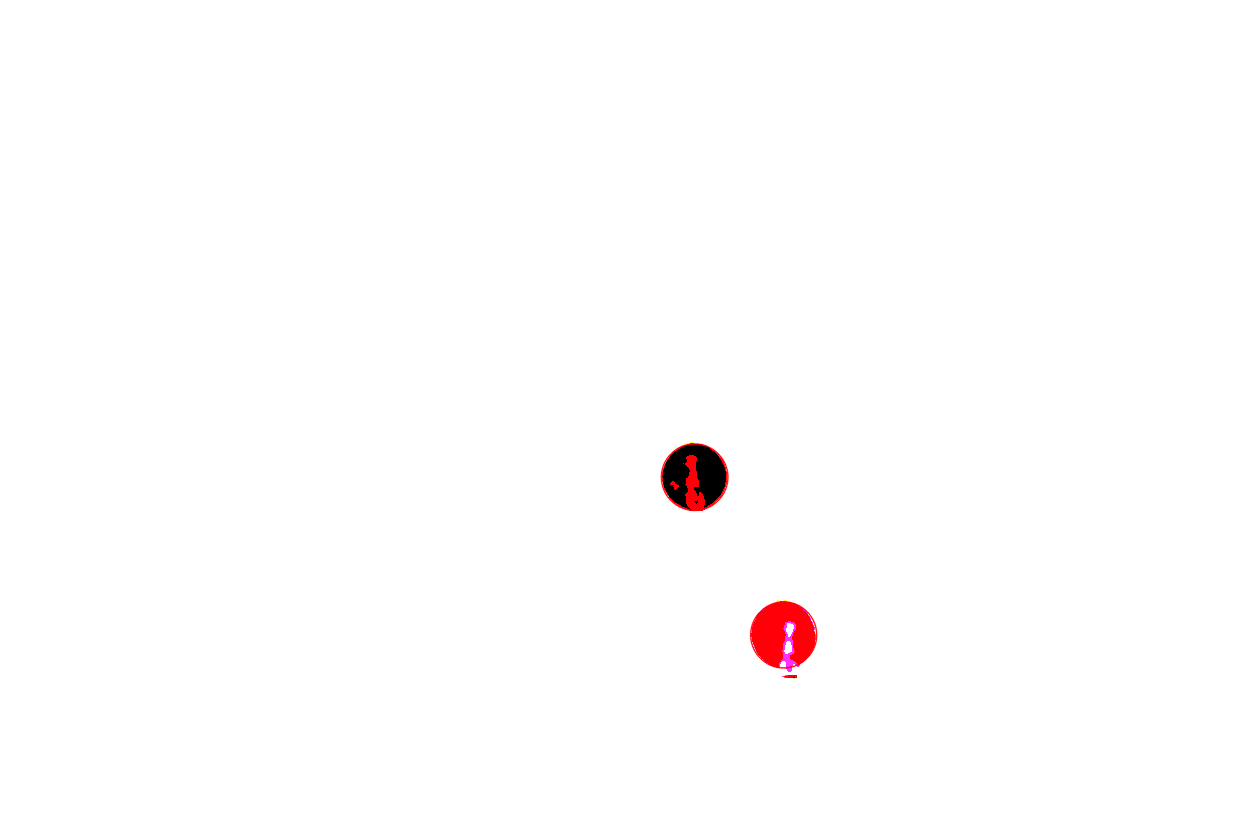
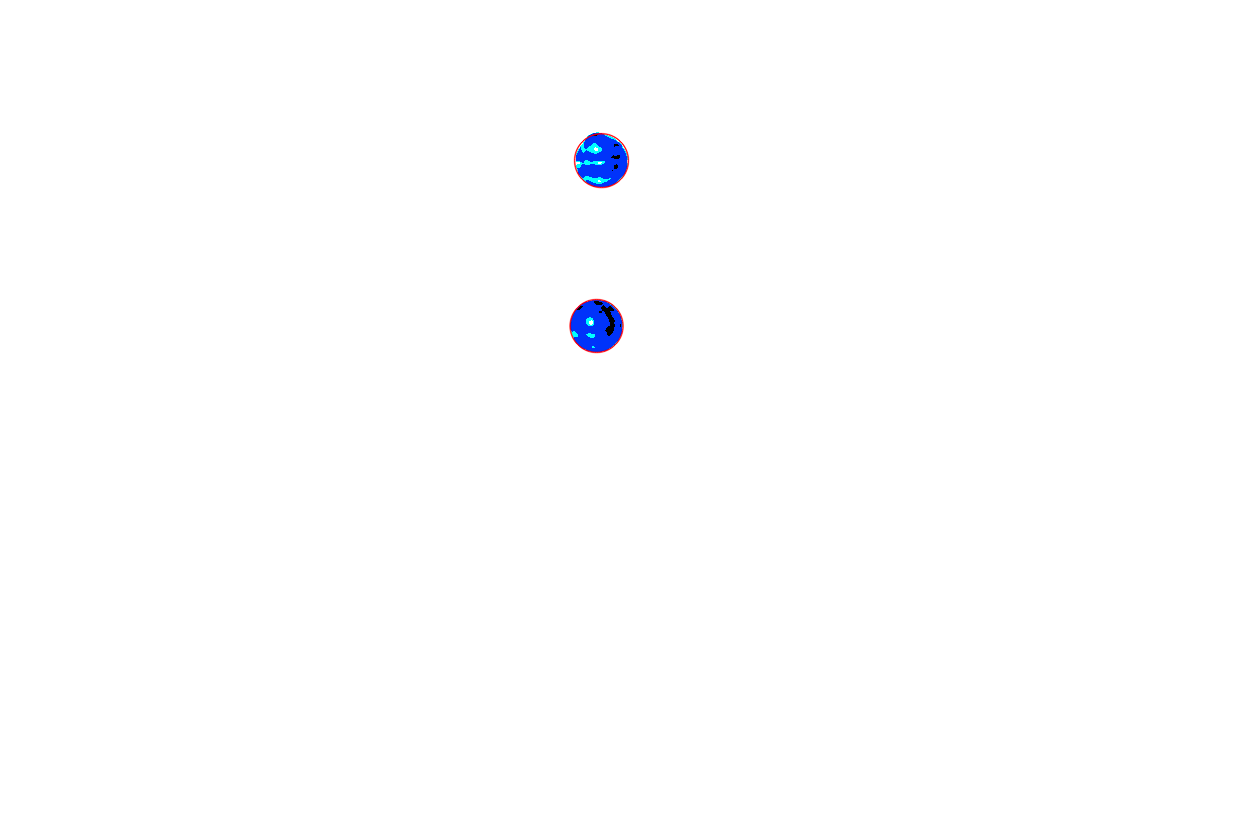
Below are some successful background subtraction and blob detection that our system can do now.