This week the team and the staff worked together to rescope the project to where:
- The robot is no longer autonomous and will be controlled via a controller
- The computer vision sub system will have a target on the display that the robot will see so that if it senses that an object is within grabbing range of the robot, the target will change color and let the user know to execute the grabbing motion.
Rescoping our project from the discussion with the teaching staff was very helpful in setting more realistic goals for the final product. The team also worked on the final presentation for the upcoming Monday.
Andy further worked on his computer vision component to a point where he observed a less than 8% false positive rate and 3% false negative rate under shadowy lighting, with less than 1% false negative and positive rate for good lighting conditions.
Hojun mainly worked on a revised CAD model for the new robot base that Omar built this week.
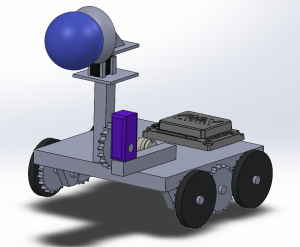
Omar built a new robot out of Rev Robotics parts for the computer, motors, encoders, motor controllers, and wheels. He also worked on integrating the existing code base for the computer vision and motor controls to work with the revised project scope, which is to be manually controlled by a person for both movement and arm procedure.
