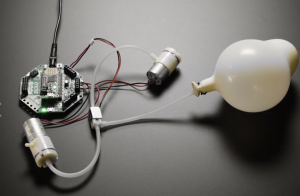
This week, I managed to get a prototype of the gripper working and have run tests on it on various lead pencils and small screwdrivers. Below is a short video of the gripper in action. On top of that, me and Omar, along with help from our TA Abha, were able to get Omar to SSH into the Jetson Xavier, which was crucial for our workflow since Omar had to move to Florida for the remainder of the project. The gripper is only a prototype, however, since one of the DC air pump/vacuums arrived faulty and could not be used to construct the full gripper system as desired in figure 1.
Next week, I plan on constructing the full air pump/vacuum system once the necessary parts arrive functioning as well as working with Omar to test iRobot’s movement by integrating the Jetson Xavier onto it now that Omar is able to SSH into the machine.